Beginners BJT

Introduzione semplificata ma
abbastanza approfondita ai transistor bipolari BJT, rivolta a chi per la prima
volta si avvicina a questo affascinate e importante argomento.

Shanghai: tratta dai titoli di coda del film "il ventaglio segreto" By adnoctis
Introduzione
Questo articolo raccoglie i concetti fondamentali a riguardo della polarizzazione del BJT.
Il transistor viene impiegato secondo il suo modello ai grandi segnali.
La teoria qui contenuta serve al calcolo del punto di riposo.
Un secondo articolo tratterà in maniera approfondita il modello ai piccoli segnali e quindi l'impiego del transistore (o dei transistori per le configurazioni multi stadio) per la progettazione degli amplificatori di tensione, di corrente, di potenza.
Questo articolo è una indispensabile introduzione per il successivo.
L'articolo verrà usato principalmente da me stesso per le lezioni che terrò negli anni a venire negli istituti di formazione professionale e scuole tecniche diurne e serali nonché i corsi hobbistici di elettronica presso il centro culturale ZIP (zona industriale di Padova).
Marco Gottardo as adnoctis
Indice degli argomenti
- configurazione PNP e NPN
- zone di lavoro del BJT (tabella fondamentale)
- caratteristiche necessarie per avere effetto transistor
- definizione di guadagno statico di corrente Bf
- modello ai grandi segnali
- simbologia
- configurazione del circuito con BJT (EC)
- caratteristica di uscita del BJT
- le correnti di dispersione
- retta di carico
- polarizzazione con 4 resistenze
- secondo esempio di polarizzazione con 4 resistenze
- il BJT come interruttore controllato
- I ponti H
- utile esempio di polarizzazione
- calcolo della Ib di saturazione
- la connessione darlington
- effetto early
- esercizio riassuntivo completo
- regola pratica "Rule of tale" per determinare la R di polarizzazione
- lo specchio di corrente
- Multivibratore astabile
- Inverter didattico
- Interdittore di linea.
Il modello ai grandi segnali
Di Marco Gottardo as ad.noctis
Iniziamo la discussione in maniera
breve e classica ovvero dicendo che l'acronimo BJT significa Bipolar junction
transistor, con cui si vuole esprimere il concetto che il flusso di cariche
maggioritarie che attraversano il canale conduttore incontreranno nel tragitto
sia il drogaggio positivo che il drogaggio negativo dei cristalli
componenti. In effetti le giunzioni nel componente sono due ma non è
questo fatto a dare il nome bensì il primo.
Gli schemi elettrici e molte formule sono volutamente scritte a mano in modo da lasciare una impronta inconfondibile nella proprietà intelletuale dell'articolo.
Prima di procedere, vi consiglio di effettuare il salto a questo link dove potrete leggere un articolo, da me scritto, che è una indispensabile, ma leggera e discorsiva, introduzione a questo articolo con valenza molto più tecnica pur essendo specificatamente pensata per i principianti. Nell'appendice di fine pagina dell'articolo nel link troverete i più comuni housing per i BJT. Questa raccolta vi servirà per i successivi passi in cui dovrete impiegare il componente in circuiti stampati fatti in FidoCad, è quindi indispensabile sapere la differenza tra un TO92 e un TO220. Chi volesse coservare una trattazione completa ed efficace sull'uso dei transistor dovrebbe creare i pdf e stampare entrambi gli articoli considerando introduttivo quello presente al link.
Leggi articolo introduttivo -> selettore canali audio a BJT
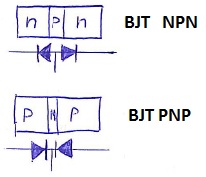
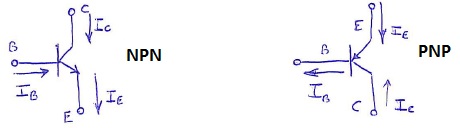
Configurazione PNP e NPN.
Come sappiamo, l'accostamento di due cristalli di diverso drogaggio, uno P con drogante del terzo gruppo e uno N con drogante del quinto gruppo della tabella periodica degli elementi, tipicamente Arsenico e Gallio, vanno a formare il diodo a giunzione con anodo e catodo orientati come in figura:

Pur non essendo semplicemente l'insieme di due diodi il transistor BJT è formato, come questo, da due giunzioni dove però spessori e intensità di drogaggio non sono casuali.
Ci sono due possibili casi con cui si presentano in sequenza i drogaggi dei tre cristalli che compongono il dispositivo:
Dalle
schematizzazioni soprariportate si potrebbe pensare che il transistor sia un
componente simmetrico, ma ovviamente non è così.
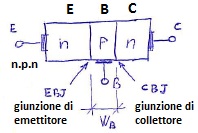
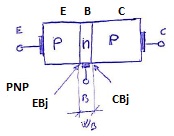
Il transistor ha tre terminali saldati ai cristalli che formano le giunzioni,
questi sono identificati con il nome Emettitore, Base, collettore.
Dove
vale la notazione:
- E = emettitore, emette cariche (con verso che dipende dalla polarizzazione)
- B = base, modula il flusso di cariche
- C = collettore, raccoglie le cariche
- Wb= larghezza del cristallo che va a comporre, iteragendo con gli altri, la giunzione di base
Zone di lavoro del BJT.
Ricordiamo che una giunzione PN si dice polarizzata direttamente quando la tensione risulta maggiore all'anodo rispetto al catodo di almeno 0,7V. Tale tensione è nota con il nome di V-gamma (nei normali diodi a giunzione).
Segue una tabella che riassume il funzionamento del BJT in funzione della polarizzazione delle giunzioni, valida sia per il modello PNP che per NPN. (è fondamentale conoscere questa tabella)
|
EBJ |
CBJ |
MODO DI FUNZIONAMENTO |
|
INVERSA |
INVERSA |
SPENTO |
|
DIRETTA |
DIRETTA |
SATURAZIONE |
|
DIRETTA |
INVERSA |
ATTIVA DIRETTA (AMPLIFICATORE) |
|
INVERSA |
DIRETTA |
ATTIVA INVERSA (PORTE TTL) |
caratteristiche necessarie per avere effetto transistor.
Affinché la doppia giunzione si comporti da transistor è necessario si verifichi che la larghezza della base Wb sia molto minore di Lb, di cui stiamo per dare la definizione.
Inoltre i drogaggi non devono avere uguale concentrazione nei tre cristalli:
- Ne = drogaggio (concentrazione) in emettitore
- Nb = drogaggio alla base
- Nc = drogaggio al collettore
Per esserci amplificazione deve valere:
Ne >> Nb (>Nc)
Definiamo con Lb il percorso medio che una carica maggioritaria riesce a percorre nel cristallo prima di ricombinarsi.
Se la larghezza della base Wb è minore della lunghezza Lb allora le cariche possono attraversare la giunzione senza ricombinarsi completamente.
All'interno del transistor vi sono correnti sia di elettroni che di lacune.
Lo scopo principale di un transistor è di fornire una grande Ic in funzione di una piccola Ib, e da questo concetto si possono ottenere svariate combinazioni di funzionamento.
In sostanza il componente risulta sempre (NELLE NORMALI APPLICAZIONI) essere l'anello di congiunzione tra due maglie , ed avendo tre terminali queste due avranno in comune uno dei tre. Siamo ora in grado di distinguere le configurazioni:
- Base comune = il terminale in comune per le due maglie è la base
- Emettitore comune = il terminale comune per due maglie è l'emettitore
- Collettore comune = il terminale in comune alle due maglie è il collettore
Per ottenere un amplificatore si deve fare lavorare il transistor in zona attiva diretta.
Per ottenere un interruttore elettronico controllato lo si fa lavorare in saturazione (interruttore chiuso) e in interdizione (interruttore aperto).
Definizione di guadagno statico.
Il costruttore fornisce il parametro B che ha due possibili forme:
- BF = guadagno statico in corrente.
- Bf = guadagno dinamico in corrente (oppure B° per non confondere i simboli)
Essendo un rapporto tra due correnti risulta semplificata l'unità di misura quindi si tratta di un numero puro spesso indicato con hfe.
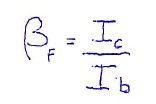
E' quindi possibile trovare un legame tra la corrente di ingresso e la corrente di uscita del transistor.
Di norma la corrente di ingresso è la corrente di comando mentre la corrente di collettore pilota il carico.
E' essenziale sapere che il transistor non è un componente lineare quindi non è applicabile direttamente la legge di Ohm. Con alcuni accorgimenti è possibile linearizzare il componente, questo consente di eseguire uno studio del circuito con il metodo di kirchhoff o il teorema di Thevenin.
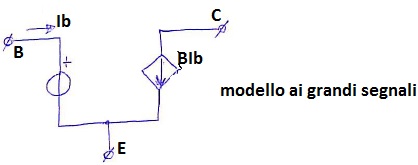
Modello ai grandi segnali (linearizzazione)
Nell'immagine vediamo il modello linearizzato del BJT NPN quando utilizzato in maniera statica, ovvero con segnali di input costanti (stazionari) detti "grandi segnali".
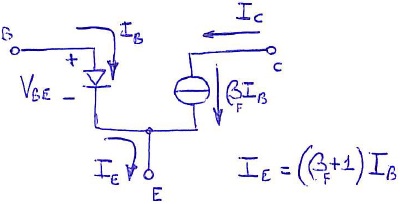
Essendo la BE polarizzata direttamente si ha:
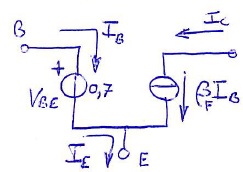
Il cui
si è sostituito il diodo equivalente nella giunzione Base-Emettitore con un
equivalente generatore di tensione costante pari alla V-Gamma di questo diodo.
Chiameremo questa tensione Vbe.
Inserisci qui il testo
I
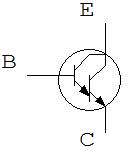
simbologia
i simboli grafici del componente sono di certo noti, possono avere o meno il
"cerchietto" attorno a seconda che il case metallico sia o no
connesso a uno dei terminali. Quando non lo è, o il contenitore è plastico
come molto spesso avviene, oppure il simbolo è semplicemente quello che
vediamo nell'immagine:
ATTENZIONE: come per il diodo a giunzione, una volta direttamente EBj e CBj è necessario impostare il valore della corrente che attraversa il componente con delle resistenze in serie.
La rete resistiva di "polarizzazione" posta attorno al transistor la pone in uno dei 4 tipi di funzionamento spiegati nella precedente tabella di polarizzazione.
Fondamentale:
Il transistor bipolare è un componente che funziona in corrente, un tentativo di pilotarlo in tensione, ovvero senza la dovuta rete di polarizzazione resistiva, a volte limitata anche alla sola resistenza di base se il carico funge anche da resistenza polarizzante, comporta l'immediata distruzione del componente.
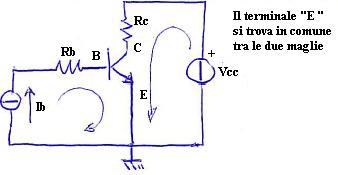
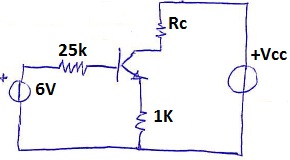
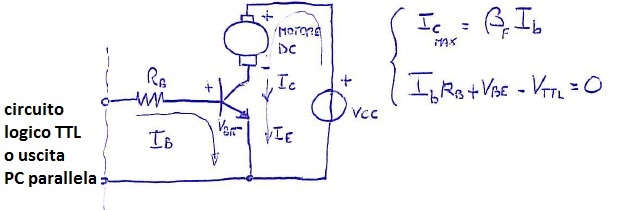
configurazione del circuito con BJT (EC).
Quando si inserisce un transistor in un circuito esso si troverà posto nel lato comune di due maglie.
La maglia di ingresso, alla quale si applica il segnale pilotante, e la maglia di uscita dalla quale preleviamo il segnale amplificato.
Il terminale che si trova in entrambe le maglie determina la configurazione del circuito, a emettitore comune, base comune, collettore comune.
Ad esempio, lo schema sottoriportato è una configurazione ad emettitore comune.
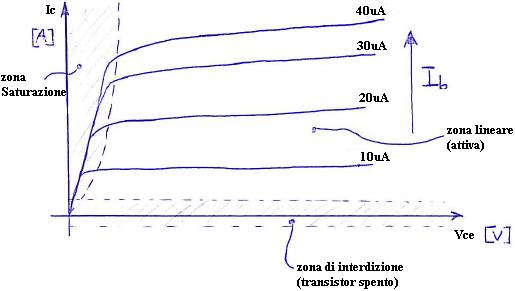
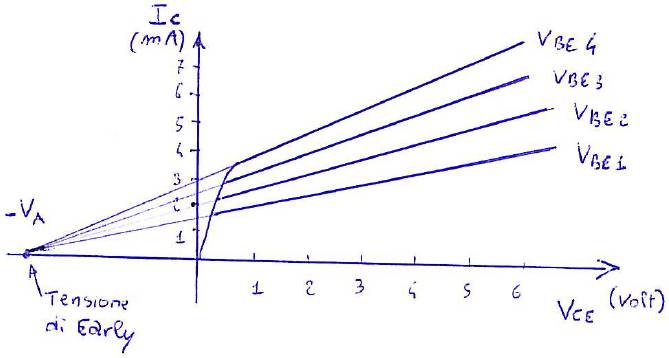
Caratteristica di uscita del BJT.
La caratteristica di un BJT è data dall'insieme di due grafici che contengono varie curve, mentre quella di ingresso ricorda grossomodo la caratteristica volt amperometrica di un diodo polarizzato in diretto (il positivo al terminale di anodo), il grafico delle curve caratteristiche di uscita sono ben più complesse come vediamo nell'immagine.
Consideriamo il transistor NPN, se polarizziamo direttamente la base compare tra Be E ovvero ai capi di BEj, una tensione che è pari a V-gamma di un diodo al silicio "acceso" (si intende polarizzato diretto), quindi 0,7V.

Nello schema precedente un aumento di Ib non comporta un aumento della Vbe che rimane costante a Vgamma pari a 0,7 Volt ma si ha un abbassamento della caduta in inverso nella giunzione CEj quindi controllo una tensione sulla resistenza di carico Rc, (di conseguenza la corrente di carico Rc) agendo su un piccolo segnale di ingresso (effetto transistor).
Le correnti di dispersioni.
L'argomento qui trattato è molto importante per la stabilità dei circuiti ma dal punto di vista concreto per molte applicazioni risulta trascurabile, ad esempio quando si usa il componente come interruttore, in modalità on/off ovvero in saturazione o in interdizione e nei cambi di stato.
Sarà specificato, o sottointeso per esperienza, quando sono trascurate le correnti di dispersione nelle formule che applicheremo.
Queste sono:
- ICEO = La corrente che vediamo passare tra collettore ed emettitore quando la base è scollegata (O=open).
- ICBO = La corrente che vediamo scorrerà tra collettore e base con l'emettitore aperto.
Entrambi questi parametri entrano in gioco nel calcolo del guadagno statico di corrente.
alfa=hfb=(Ic-Icbo)/Ie
beta=hfe=(alfa)/(1-alfa)=(Ic-Iceo)/Ib
Le correnti di dispersione generate termicamente sono
Iceo=(B+1)*Icbo
La costante indicata con la lettera greca alfa risulta essere minore di 1 esprime la proporzione tra i portatori di maggioranza di carica, che sono gli elettroni nel tipo NPN e le lacune nel tipo PNP,che vengono iniettati nella base dall'emettitore e che si ricombinano verso il collettore.
Per quanto riguarda l'influenza delle correnti di dispersione nei tre parametri normalmente usati valgono le seguenti equazioni:
- IC=B*IB+(B+1)*ICBO
- IB=[IE/(B+1)]-ICBO
- IE=[(B+1)/B]*(IC-ICBO)
Per quanto riguarda l'effetto sulle caratteristiche di uscita del grafico del capoverso precedente, si potrà notare, facendo opportune misurazioni, che la circa a IB=0 , non risulta parallela e sovrapposta all'asse delle ascisse ovvero all'asse VCE orizzontale ma leggermente inclinata verso l'alto (come vedremo a causa dell'effetto early) e discostata di un valore ICBO sia proporzionale al valore VCE, quindi aumenta leggermente spostandosi verso destra, che derivando con la temperatura.
ICBO mostra mediamente un raddoppio ad ogni aumento della temperatura di 10 gradi, si ha quindi una conseguente variazione di Bstatico generalmente chiamato BF di ben 1% per grado centigrado di aumento della temperatura delle giunzioni.
In definitiva la variazione di B con la temperatura può essere così ampia da superare anche il 200% .
La retta di carico
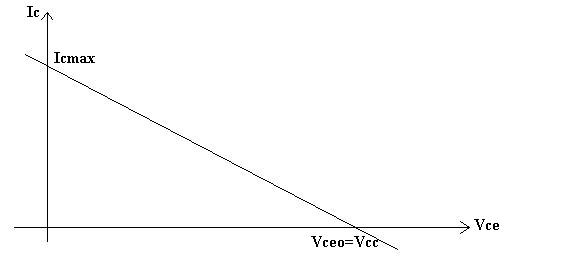
Consideriamo il grafico delle caratteristiche di uscita, posto il punto Ic(max) fornito nella documentazione del costruttore del BJT, di un transistor collegato alla sua rete di polarizzazione, che si trova nella zona di saturazione in ordinata, e posto il valore di Vce ottenuto con il medesimo circuito di polarizzazione nella zona di interdizione, in ascissa, uniti tramite una funzione Y=-m(x)+Q tracciata per due punti, usando la teoria spiegata a questo link:
http://www.ripmat.it/mate/d/dc/dcee.html
ovvero: considerando i due punti P1=Vce(sat),Ic(max) e P2=Vceo,Iczero il primo situato sull'asse verticale (ordinata) e il secondo sull'asse orizzontale (ascissa)
Si traccia la retta tra questi due punti ovvero:
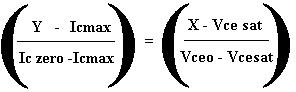
si ottiene la retta di carico.
Tramite la Rb si imposta un valore di Ib determinando una delle curve che intersecano la retta di carico. si identifica quindi un particolare punto generalmente indicato in bibliografia con "Q".
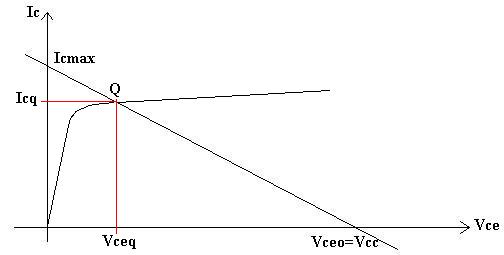
Il punto Q identifica sulle ordinate il valore della corrente di polarizzazione alle specifiche condizioni di polarizzazione e in ascissa il valore della tensione residua tra il terminale di colettore e quello di emettitore rispetto alla maglia di uscita in cui è connesso il generatore Vcc supposto unipolare con il negativo verso l'emettitore nello schema precedentemente disegnato.
In bibliografia "Q" è indicato come "punto di lavoro" o anche "punto di riposo" del transistor ottenuto con particolari condizioni di polarizzazione.
Genericamente il punto di lavoro si calcola impostando un sistema di equazioni in cui compare:
- L'equazione della maglia di ingresso che solitamente fissa Ib
- il legame tra la corrente di base e quella di collettore identificata tramite il guadagno statico
- L'equazione della maglia di uscita che solitamente fissa Ic oppure Vce
La soluzione di questo sistema porta al definire il valore delle variabili Vce e Ic alle particolari condizioni di polarizzazione dipendenti dai valori delle resistenze scelte connesse direttamente ai morsetti del dispositivo, ovvero indentifica il punto di lavoro Q=(Vceq,Icq)
Nella prossima pubblicazione "Beginner BJT ai piccoli segnali" scopriremo che la retta di carico statica, qui presentata, non coincide con la retta di carico dinamica dato che sono i diversi i parametri che portano a tracciarla.
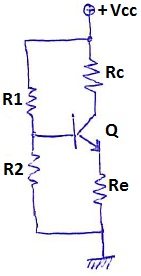
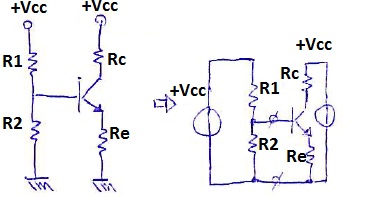
Polarizzazione con 4 resistenze.
Introduciamo la polarizzazione con 4 resistenze mostrando lo svolgimento dell'esercizio che segue. Si tratta di una configurazione molto ricorrente, ovvero della presenza di due resistenze formanti una sorta di partitore (non trattabile con le stesse formule del partitore di tensione), una resistenza attraversata dalla sola corrente di collettore Rc, e una resistenta attraversata dalla somma della corrente di colettore e della corrente di base Re.
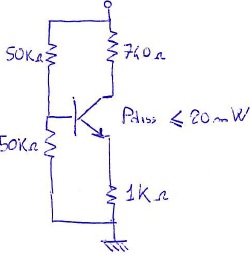
La situazione circuitale è quella dell'immagine:
I dati del problema sono:
Per il BJT:
- Vbe=0,7V
- BF =80
- Vcesat=0,2V
Per il circuito sono:
- Vcc=12V
- R1=R2=50k
- Re=1k
Si ipotizzi il BJT opeante in zona attiva diretta e in tal senso se ne verifichino le condizioni di lavoro.
Domande: Determinare Rc in modo che il BJT sia in zona attiva diretta con una potenza max dissipata pari a 20mWatt.
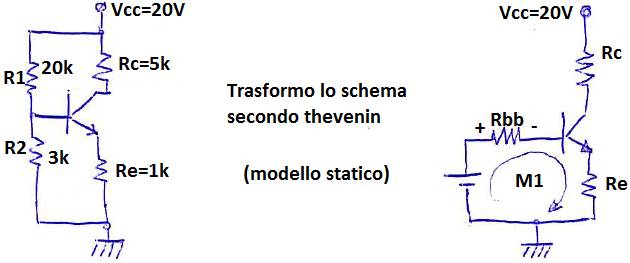
Soluzione: Per arrivare agevolmente alla soluzione del problema si cerchi di ricavare uno schema equivalente ma privo di retroazione.
Tagliando le connessioni tra R2 e Rc ottengo uno schema equivalente a patto che si applichi a entrambi i nuovi terminali la medesima tensione Vcc.
La situazione diventa:
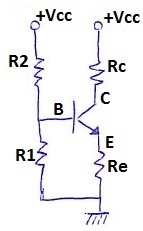
Così facendo si è eliminata la retrazione e si può ridisegnare il medesimo schema come se alla maglia di ingrasso esistesse un generatore di segnale di valore pari a Vcc.
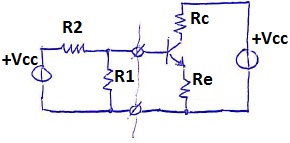
Applicando il teorema di thevenin ai morsetti di input (stacco il carico ovvero lo schema a monte dei morsetti), ottengo:
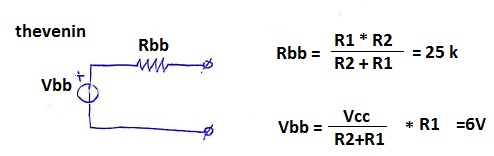
Si può quindi disegnare il circuito equivalente secondo thevenin che vediamo nell'immagine:
Nel circuito così ottenuto inserisco il modello lineare del BJT supposto che stia lavorando in zona attiva diretta (che equivale a poter sostituire la giunzione base-emettitore con un diodo polarizzato diretto e quindi un generatore ideale di tensione pari a Vgamma, pari a 0,7 v.
Si ottiene il circuito equivalente linearizzato che vediamo qui sotto, in cui è avvenuta la sostituzione del BJT con il suo modello lineare ai grandi segnali, valido per il componente NPN:
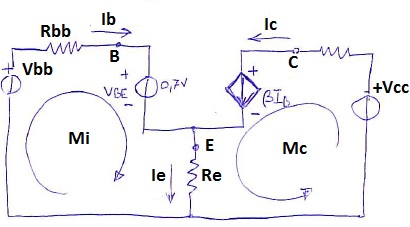
Per determinare i versi delle correnti si imposta il sistema:
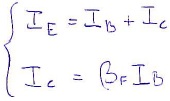
Eseguiamo ora la legge di Kirchhoff al nodo sul terminale di emettitore
Ie = Ib +Ic
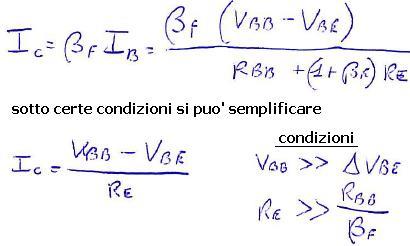
dalla relazione esistente tra la corrente di base e quella di collettore Ic = BF * Ib si ricava Ie = Ib + BF* Ic da cui raccogliendo Ib si ottiene:
Ie = Ib *(1+BF)
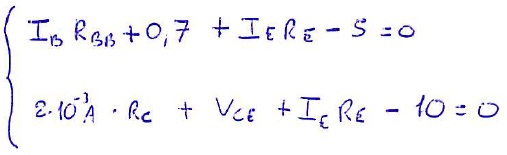
La corrente sulla maglia M1+è data dall'equazione di Kirchhoff (seconda legge).
IbRbb + Vbe + IERe -Vbb
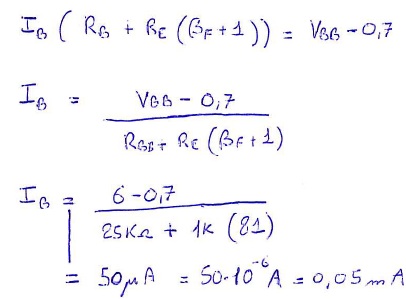
Sostituendo il valore trovato di Ie nell'equazione IbRb +Vbe +Ib(1+BF)-Vbb=0
Sapendo che la giunzione Base-Emettitore risulta equivalente a un diodo quando polarizzata direttamente, si arriva all'equazione:
IbRb +0,7Volt +Ib(1+BF)-Vbb=0
L'unica incognita è la corrente di Base visto che il parametro BF è dato dal costruttore e in questo caso vale 80.
Ricavo Ib.
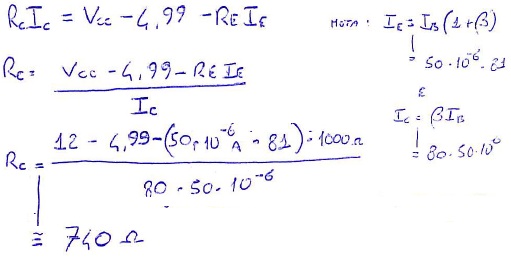
Ora verifichiamo la maglia di uscita

Le incognite sono Vce e Rc
Bisognerà impostare un sistema con una seconda equazione relativa alle potenze per ricavare la seconda incognita.
![]()
Il sistema risolvente è:
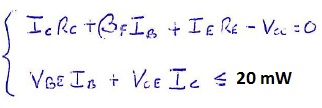
Compaiono due equazioni e due incognite quindi per il teorema di Rouchè Capelli ammette (esiste) una soluzione.
Risolvendo per sostituzione di variabile si ottiene:
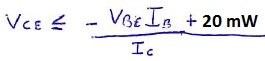
Ricordando che vale Ic=B*Ib
e che inoltre vale Vbe = 0,7 volt con la giunzione polarizzata direttamente.
Sostituendo si ha:
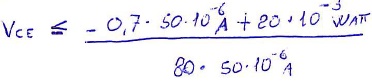
da cui, svolgendo semplici calcoli e passaggi, si ottiene :
![]()
In conclusione, essendo questo valore maggiore del valore tipico di saturazione (0,2V), possiamo affermare che il BJT sta lavorando in zona attiva diretta.
Ora ricaviamo la seconda variabile ovvero la Rc.
Possiamo completare lo schema elettrico iniziale con i valori resistivi della rete di polarizzazione calcolati.
 .
.
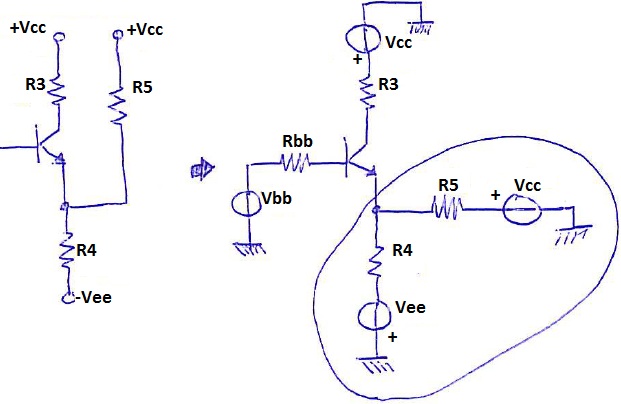
Secondo esempio di polarizzazione con 5 resistenze
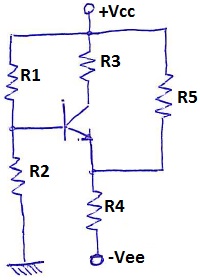
Vediamo un esempio analogo al precedente in cui cambia la topologia della rete, si alimenta con una tensione duale e viene inserita la resistenza R5 che ripartisce assieme alla resistenza R4 la tensione presente al terminal di emettitore.
La tensione duale è simmetrica, quindi vale Vcc= Vee= 5Volt ma con le polarità classiche avremo sotto R4 il polo negativo del generatore Vee e quindi percepiremo una tensione (pseudo) negativa pari a -Vee.
Lo schema è questo:
I dati del problema sono:
- Vcc = Vee = 5V
- R1 = R2 50k
- R3 = 1k
- R4 =10k
- R5 =2k
- Vbe = 0,7V
- BF = 100
- Vce(sat) = 0,2V
Determinare la zona di lavoro del BJT.
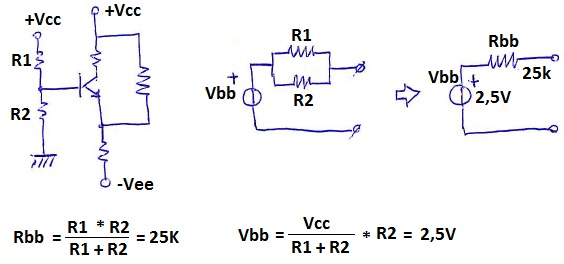
Soluzione: Si deve cercare di rappresentare il circuito in maniera più semplice, senza retroazioni. A tal fine sfruttiamo l'equi potenzialità delle tensioni ai morsetti di R1 e R3, quindi tagliamo virtualmente il la loro connessione e ripristiniamo (virtualmente) le alimentazioni con due generatori identici e pari a +Vcc, in sostanza al circuito originale non abbiamo fatto nulla.
La situazione per la maglia di ingresso è visibile nell'immagini a cui applichiamo anche il teorema di thevenin.
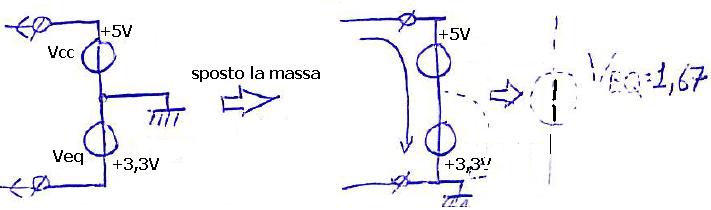
Vediamo come analizzare la maglia di uscita.
Applico il principio di sovrapposizione degli effetti, operiamo innanzi tutto cercando di capire come si sono ricavati i generatori di tensione ai rami di emettitore con le corrette polarità.
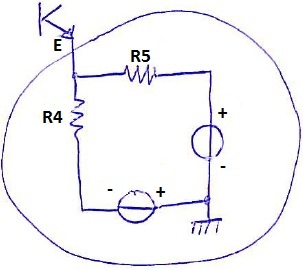
Annullo il generatore su R4 e faccio agire sollo quello su R5 trovando il primo effetto:
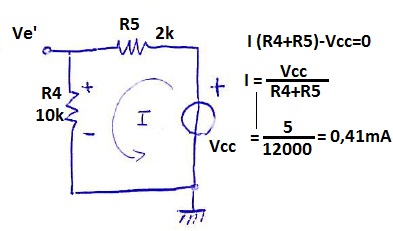
Nota la corrente si trova la tensione Ve' moltiplicandola per R4 dato che è riferita alla massa.
Ve' = I * R4 = 0,41mA*10k= 4,1V
L'effetto del secondo generatore è il seguente.
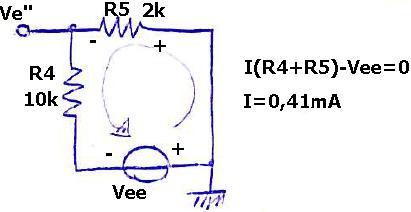
In questo caso la tensione Ve'' alla porta vale:
Ve''= I*R4-Vee= (0,41*10^-3*10000)-5=-0,9V
La somma algebrica vale:
Ve=Ve'+Ve''
Quindi: Ve=4,1-0,9 =3,2V
La resistenza equivalente alla porta vale invece R5//R4 calcolando si ha:
Req=R5//R4= (10k*2k)/(10k+2k)
Req=1k66 ohm
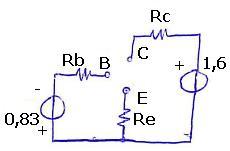
Ridisegniamo lo schema sostituendo i nuovi parametri calcolati
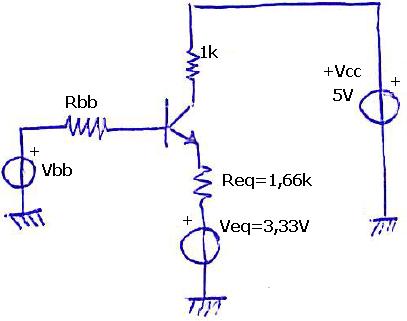
Ora applichiamo una regola che ci permette di spostare i generatori a monte o a valle di un nodo.
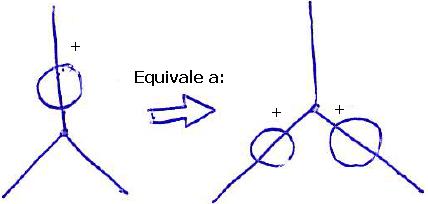
Con generatori prima e dopo dello spostamento dello stesso valore.
Con questa tecnica sono in grado di togliere il generatore dall'emettitore "distribuendolo" sulla maglia di base e di collettore.
in definitiva si ottiene il sovrastante schema in cui si identificano:
- Mi = Maglia di ingresso
- Mo = Maglia di uscita
Cominciamo con la maglia di ingresso.
Ib*Rbb+Vbe+Ie*1,66k+3,33v-2,5v=0
Si ricorda che vale Ie=Ib+Beta*Ib=Ib*(1+Beta)
Supponendo che il transistor si trovi nella sua zona attiva diretta in cui Ic=Beta*Ib
Ib*Rbb+0,7+Ib*101*1k66+0,83=0
Raccogliendo a fattore comune.
Ib*(25k+101*1k66)+0,7+0,83=0
si ottiene un risultato di corrente di base con segno negativo
Ib= (-0,7-0,83)/192660
da cui Ib=-8uA (circa)
Questi otto micro ampere negativi in base sono incompatibili con la condizione di zona attiva diretta che comporta una corrente di base positiva.
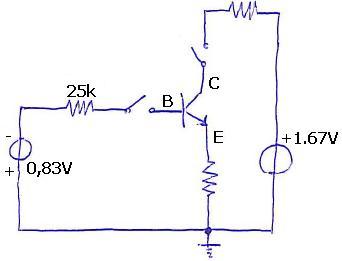
Procediamo al controllo della maglia di uscita.
Ic*1k+Vce+IeRqe-1,67V=0
sostituisco Ic=B(beta)*Ib (ricordo che Beta è circa hfe)
Rimane come incognita Vce, e poi risolvo il sistema.
Vce=1,67V-IReq-Ic*1k
dato che Ie=Ib*(B+1)
con Ib calcolato precedentemente Ib=8uA
Ic=B*Ib = 100 * 8 *10^(-6) = 0,0008A
Vce = 1,67 - 0,0008*1660-0,0008*1000
Vce=1,67 - 0,0008*1660-0,8
si ricava
Vce = -0,458 Volt
Il valore trovato è assurdo, infatti la Vce può scendere al massimo a 0,2V in condizione di saturazione (per il BJT NPN). Quindi l'ipotesi di zona attiva diretta non è comprovata dalla situazione circuitale ovvero dalla specifica rete di polarizzazione e sistema di segnali e alimentazioni.
Ipotizziamo ora che il BJT sia in interdizione.
 Ve=0
Vb=-0,8V Vc=1,67V
Ve=0
Vb=-0,8V Vc=1,67V
Togliendo virtualmente il BJT e misurando le tensioni dei terminali liberi rispetto alla massa.
Vce=1,67
Vbe=-0,83
La situazione rispetto ai generatori equivalenti è:
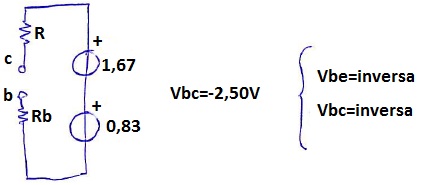
La particolare situazione di polarizzazione indica che il BJT è interdetto.
Rifacciamo ora le stesse prove ma sostituendo la resistenza R2 con una da 330K.
Si vedrà che il BJT passa in zona attiva diretta.
Il BJT come interruttore controllato.
.E' noto in elettronica digitale che un circuito logico TTL fornisce dei segnali di comando non adatti a pilotare carichi quali motorio lampadine nonché bobine di relè.
I BJT vengono usati per creare dei validi circuiti di interfaccia tra i due mondi a bassa e più alta potenza.
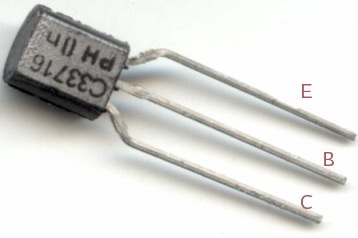
Il BC337 è un BJT NPN in grado di sopportare una Tcmax=1A (garantito 0,8 in alcuni data book) e con un Bmax = 350
Ovviamente per motore si intende un piccolo attuatore per asservimenti dato che la corrente massima di collettore di questo BJT è piuttosto modesta, ma concettualmente parlando sarà possibile riportare i concetti esposti a BJT e a motori o carichi di taglia più robusta.
Genericamente parlando, in caso di robusti carichi induttivi, pilotati ON/OFF, è bene pilotare con il BJT la bobina di un relè o di un teleruttore.
Ricordiamoci inoltre che è bene proteggere le giunzioni con dei diodi a commutazione veloce e portata sufficiente rispetto alle extra correnti induttive che si generano a causa delle tensioni inverse in fase di apertura. (diodi di ricircolo).
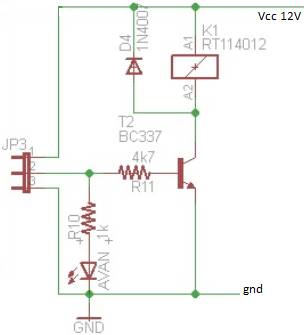
Il diodo di ricircolo rappresentato nel semplice schema (interfaccia di potenza per segnali TTL) sopra indicato, dipenderà dal tipo di relè impiegato, ovvero dalla sua bobina. Ottime soluzioni sono i diodi 1N5822, per extra correnti stimate attorno all'ampere e mezzo (attenzione che non coincidono direttamente con la corrente circolante sul carico, difatti prima interviene il diodo, inteso a tensione di innesco, minore sarà la scarica in ampere), il diodo 1N5825 per tensioni di circa 40V e correnti di scarica sino a 3A.
Sono funzionali anche altri tipi di diodo come ad esempio P600K (molto robusto) oppure FR303, è comunque fondamentale proteggere le giunzioni con questi ricircoli quando si usano i BJT in applicazioni di questo tipo.
Vediamo rapidamente alcuni esempi in cui si distingue a colpo d'occhio la presenza dei diodi di ricircolo:
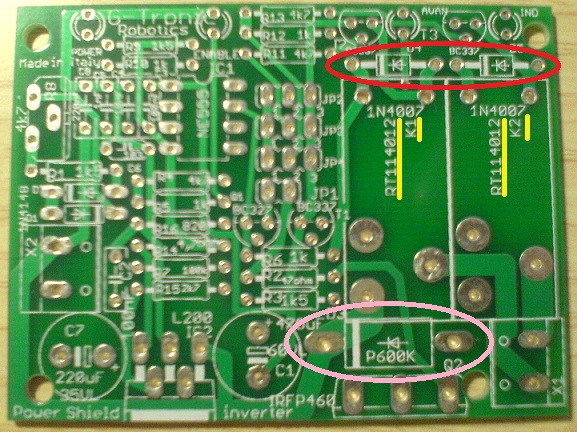
Nel circuito sovrastante, presentato nel capitolo 15 del tutorial online "Let's GO PIC!!!" sono evidenziati i due punti in cui è essenziale eseguire un ricircolo delle exstra correnti induttive:
clicca qua per vedere l'articolo completo -> Let's GO PIC!!! cap.15
I due diodi più piccoli servono al ricircolo delle extra correnti dovute all'apertura del comando delle bobine dei dure relè (indicati in giallo K1 e K2). Le extra correnti sono presenti ma comunque modeste quindi andranno bene i diodi 1N5822. In questo punto del circuito abbiamo dei segnali lenti e stabili, quindi degli eventi rari di on/off, così che saremo autorizzati a sostituire quei diodi anche con dei semplici 1N4004. Nela foto sono cerchiati in rosso.
Il ricircolo più importante deve essere invece svolto come protezione delle giunzioni dell'elemento attivo di potenza comandato in PWM. E' stato cerchiato in rosa questo diodo di particolare potenza che potrà essere sostituito con un FR303 o uno adatto all'applicazione in svolgimento a partire con la ricerca fatta con questo nome nei databook e spostandosi ai modelli leggermente superiori o inferiori.
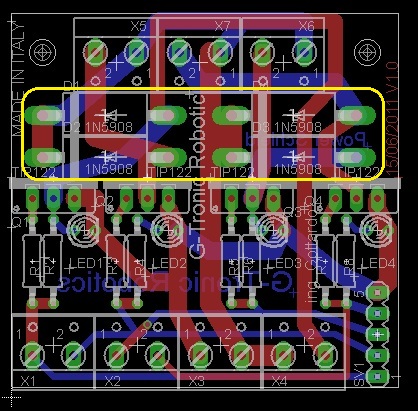
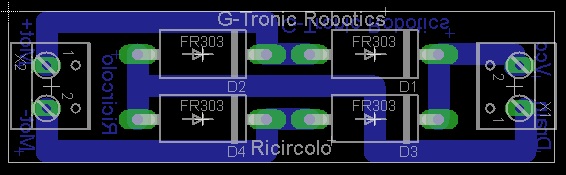
In analogia a quanto mostrato sopra vediamo in anteprima il nuovo progetto del gruppo G-Tronic Robotics che verrà presentato a breve con un apposito articolo.
Anticipiamo che si tratta di un controllo intelligente multicanale per attuatori D.C. a eccitazione serie e magnete permanente, anche se avendo il Bus del microcontroller aperto potrà interfacciarsi a altri minishield per pilotare ad esempio elettrovalvole e motori stepper.
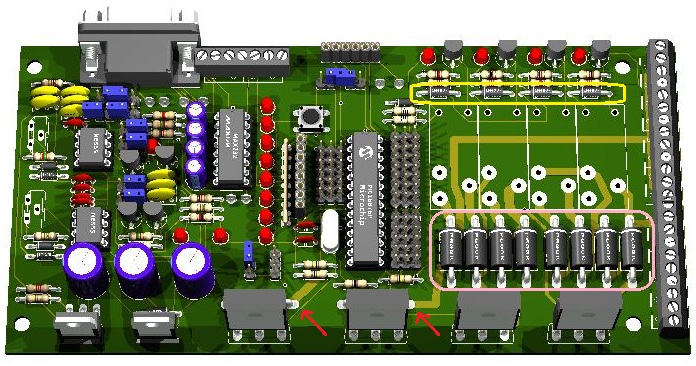
In giallo sono cerchiati i diodi di ricircolo di protezione dei BJT di comando delle bobine dei relè, mentre in rosa sono evidenziati quelli di protezione di ogni singolo contatto dei due ponti H integrati.
Le frecce rosse indicano invece i diodi di protezione (nascosti nell'immagine) degli elementi attivi controllati in PWM.
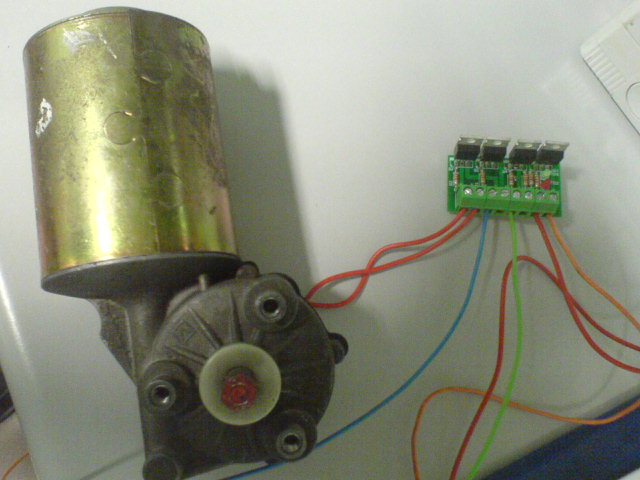
Vediamo un esempio molto semplice ma di grande utilità.
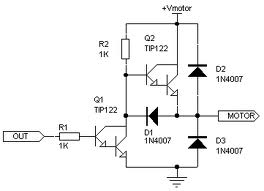
Il circuito sotto riportato rappresenta il "minishield uscite di potenza" appositamente studiato per interfacciare la Micro-GT mini del corso "Let's GO PIC!!!". La configurazione circuitale è semplice ed essenziale.
I TIP122 sono rappresentati nello schema come normali BJT ma si tratta in realtà di transistor in connessione Darlington piuttosto potenti che permetteranno di interfacciare al Microcontrollore della Micro-GT mini ben 4 Motori con circuito di indotto a spazzole e collettore e circuito di eccitazione a magnete permanente. Questi motori potranno avere una corrente di spunto di ben 8A e una corrente di assorbimento continua di circa 5A.
Ai morsetti indicati con X1-1, X1-2,X2-1,X2,2 giunge il segnale proveniente dal PORT di uscita del microprocessore o microcontrollore, genericamente a livello TTL. Tra poco vedremo che la configurazione darlington comprende in realtà due BJT che potranno essere omologhi (configurazione tipica) o anche complementari, ma solitamente integrati all'interno dello stesso contenitore (housing).
Il guadagno risulta essere il prodotto delle due Bf (parametro genericamente conosciuto come hfe) per cui il componente è in grado di gestire elevate potenze per mantenendo una buona sensibilità in ingresso.
Si presenteranno esternamente con i medesimi tre terminali B,C,E nella tipologia con housing TO220.
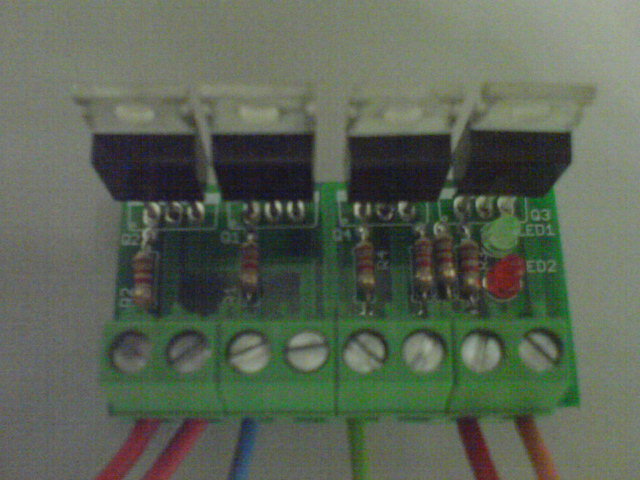
La saturazione dei darlington di questo minishield avviene con circa 10mA in base.
La resistenza in base, che comporta la saturazione, è di circa 220 ohm, ovvero R1, R3, R5, R7.
Nel circuito stampato di questo minishield vediamo i quattro diodi di ricircolo abbinati ai singoli canali di potenza.
Ovviamente se dovessimo pilotare dei carichi resistivi, o degli illuminatori a LED potremmo anche non montare queste protezioni.
Un articolo che presenta questo minishield è leggibile a questo indirizzo -> Let's GO Pic cap.17
I ponti H.
Le configurazioni didattiche dei ponti H risultano senz'altro funzionali, ma da adoperarsi con cautela perché soggette a problematiche varie, quali, surriscaldamenti degli elementi "in alto" della configurazione a ponte, e corto circuito degli elementi (gambe dell'inverter) in caso di errata manovra da parte del sistema di controllo.
Di sicuro questi circuiti didattici vengono prodotti privi di diodi di ricircolo, ma è possibile ovviare a questa mancanza esternamente sia collegando i diodi "volanti" a livello della morsettiera che abbinando al circuito questa semplice soluzione di PCB a singola faccia:
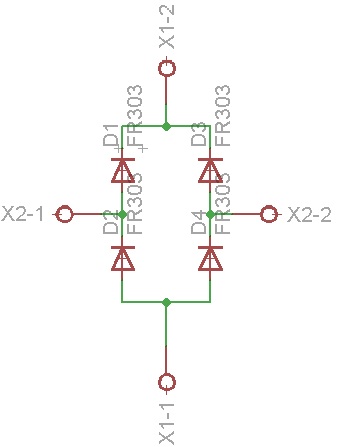
Schema elettrico soluzione circuitale diodi di ricircolo per ponti H sprovvisti
Download ->Circuito stampato a singola faccia che per diodi di ricircolo
Se vogliamo collegare i diodi esternamente al circuito, come nel caso del prossimo semplice PCB, che personalmente uso spesso sia come ponte H che come minishield a due canali (montando solo due transistor NPN oppure PNP a seconda dell'utilizzo finale).
Come chiaramente detto questa non è la configurazione a ponte ottimale, ma forse è la migliore per cominciare a affrontarne lo studio evidenziando, anche matematicamente, i difetti e i pregi. Ovviamente esistono varie soluzioni "integrate" ma che non centrano in questo momento che stiamo studiando i BJT.
Saranno proprio i difetti sopracitati di questo tipo di ponte H che ci introdurrà molti argomenti di studio.
Qualche riga più sotto verrà anche presentata una modalità di utilizzo del PCB come minishield per Micro-GT, ovvero la trasformazione di questo circuito a ponte in una semplice ma funzionale interfaccia di potenza a due canali in grado di pilotare con i segnali provenienti dal PIC relè, teleruttori, o anche due motori DC di discreta stazza sia in semplice marcia/arresto che in controllo di velocità PWM.
La dimostrazione della funzionalità del ponte H presentato (ripeto non ottimizzata, ovvero se vogliamo realizzare un ponte H è meglio non fare semplicemente così, ma almeno usare elementi PNP sopra e NPN sotto, con altre soluzioni di protezione) è visibile nella foto e nel video scaricabile ed eseguibile con quickTime.
Vediamo un video che dimostra il funzionamento del ponte H
Download -> test del ponte H
Ecco la realizzazione su circuito stampato con Eagle in materiale FR4 dual layer.
Lo schema elettrico di questa semplice configurazione a ponte, didattica e non protetta, è il seguente.
Vediamo nell'immagine successiva come collegare i diodi di ricircolo esterni a questo circuito, mostriamo prima il layout componenti e lo sbroglio fatto in Eagle e poi la connessione dei diodi di ricircolo.
Layout del ponte H didattico G-Tronic, può essere facilmente ottimizzato sostituendo i due TIP122 in alto con i complementari TIP127 ottimizzando le dissipazioni termiche. Sono anche facilmente separabili i segnali di comando TTL (fornendone 4 anziché 2 con le uscite del microcontrollore al fine di evitare ogni possibilità di comando vietato che può comportare un corto circuito).
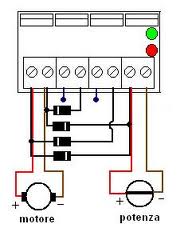
Ecco come collegare i diodi di ricircolo esterni senza dovere intervenire sul PCB.
Un' altra applicazione dei diodi di ricircolo è nella nota scheda Micro-GT PIC versatile I.D.E dove i diodi di ricircolo compaiono nel pilotaggio ben due sezioni, quella relativa al motore DC, realizzata con un ponte H, fatto sempre con i transistor darlington di tipo TIP122 muniti però di uno stadio driver che sfrutta i comparatori contenuti all'interno di un doppio amplificatore operazionale di tipo LM358, che ne adatta i livelli di tensione in input e si cura della protezione contro alcune manovre errate. I riferimenti di tensione costanti, indipendentemente dalla tensione esterna di alimentazione da portare all'indotto dell'attuatore è generata con due zener da 2,7V. Nell'immagine vediamo questa sezione della Micro-GT
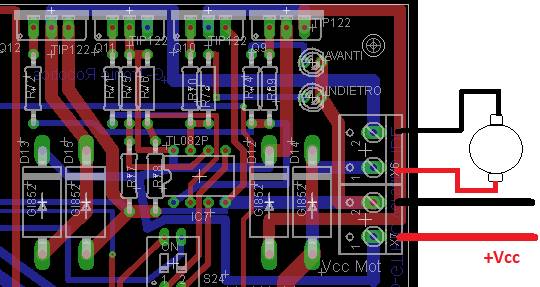
I due zener vanno inseriti al posto delle resistenze R7 e R8, e renderanno il riferimento ai comparatori indipendenti dalla tensione di alimentazione Vcc che vediamo entrare dalla destra, morsetto X7-1.
I diodi D12,D13,D14,D15 sono i ricircoli che proteggono le giunzioni dei TIP122 e risultano collegati come nello schema sottostante:
Alla sinistra, è stato tagliato la parte di schema relativa ai driver del ponte tramite gli operazionali. Si ricorda che con dei piccoli accorgimenti è possibile sostituire i transistor più in alto con i complementari PNP ovvero i TIP127 ed anche effettuare il controllo con 4 segnali dal micro, alti per saturare i TIP in basso e zero per saturare i TIP in alto.
Esistono molte soluzioni anche integrate per realizzare ponti e mezzi ponti H, ecco come, a volte, sono inseriti i ricircoli.
Anche il Ponte H inserito nella Micro-Gt può essere usato, per pilotare due carichi separati come bobine di teleruttori, oppure singoli motori DC, ecc. I diodi di ricircolo si troveranno automaticamente nella posizione corretta.
Come possiamo vedere nello schema non montiamo i transistor siglati con Q1 e Q3, e ovviamente neppure le loro resistenze di base R1 e R3. Montiamo solo i due diodi di ricircolo in alto e procediamo al cablaggi delle bobine dei teleruttori (o dell'indotto dei due motori che vogliamo controllare) con il negativo (motore) o A2(bobina del teleruttore) ai morsetti X3-1 e X3-2, dove il ponte completo aspettava entrambi i morsetti dell'unico motore, mentre il secondo terminale andrà serrato esternamente a X4-1 assieme al conduttore di alimentazione positiva proveniente dal generatore di potenza.
Ovviamente la massa dovrà risultare in comune con il sistema di controllo, tenendo presente che "quelli veri" presentano più masse tra loro isolate tramite dispositivi optoelettronici.
Facciamo attenzione ad effettuare il collegamento in maniera da non bypassare l'optoisolamento.
I calcoli da eseguire per il dimensionamento della resistenza di base sono già stati esposti, comunque porteranno a scegliere RB=220ohm, per la corretta saturazione del darlington.
Ricordo che Icmax potrà valere, in maniera impulsiva, ad esempio tramite il controllo PWM, circa 8A.
La seconda posizione all'interno della Micro-GT IDE, in cui sono installati i ricircoli è in corrispondenza dei morsetti di collegamento delle bobine del motore passo/passo direttamente interfacciabile.
All'interno del circuito integrato L298, tipicamente usato per il controllo di potenza dei motori stepper, sono collocati due ponti H complementati con una piccola rete logica che impedisce ai segnali di comando errati di mettere in corto circuito i ponti. i piedini 1 e 15 inoltre rappresentano il filo di chiusura verso masso del ponte, potremmo dire gli emettitori dei transistor in basso. Se invece di portarli direttamente alla massa vi colleghiamo una resistenza di basso valore, ad esempio 0,5 ohm, ottenuta mettendo in parallelo due resistenze da 1W e 1Ohm, ricaverò una tensione di caduta proporzionale alla corrente che sta attraversando l'indotto del motore e quindi anche le giunzioni CE dei transistor. Questa tensione viene generalmente usata per effettuare un controllo sullo stato di coppia e di funzionamento del motore, è quindi in grado di generare un allarme nel caso il rotore del motore si bloccasse o fosse sotto eccessivo sforzo.
Di norma il circuito integrato L298 funziona in coppia con L297, che si occupa non solo della generazione di passo in senso di marcia avanti "CW" e indietro "ACW".
Nella Micro-GT potremmo emulare queste funzioni via software, e le tensioni potranno ad esempio essere acquisite con due canali analogici del PIC dopo avere chiuso di dipswitch S9 e avere collegato il cavetto flat agli appositi PIN.
Vediamo la posizione dei due circuiti nel layout della Micro-GT IDE.
L'area evidenziata in rosso mostra la sezione ponte H ai cui morsetti possiamo collegare la tensione di potenza proveniente da una alimentazione separata rispetto a quella che alimenta la logica. Notiamo il circuito integrato DIL8 che consente l'interfacciamento e la protezione del ponte contro alcune particolari manovre distruttive. Le resistenza R8 e R9 disegnate davanti a questo integrato sono in realtà due diodi zener del valore di 2,7V con catodo verso l'alto.
La zona in giallo evidenzia la sezione di potenza per lo stepper motor oppure due motori DC con corrente massima di 2A ciascuno.
Bisogna fare attenzione a non mettere in corto i darlington collegandoli alla stessa aletta ed anche il L298. In realtà per le applicazioni didattiche questi componenti risultano freddi e non ne hanno bisogno, ma giusto in caso ricordiamoci di mettere le opportune piastrine isolanti tra l'housing del componente e il metallo del dissipatore.
Nel filmino vediamo il ponte H in azione durante una lezione di programmazione dei Micro-controllori PIC da me svolta presso il centro culturale ZIP di Padova.
Nel film sovrastante non sono al massimo della forma perché era l'una di notte e la giornata era stata molto lunga. Un applauso agli eroici allievi che hanno resistito fina a quell'ora così tarda.
Nel prossimo video possiamo vedere degli allievi giocattolare con il ponte H integrato nella Micro-GT.
Avrete sicuramente notato il simpatico accento veneto dei miei studenti serali, ma la cosa più importante da notare è che vengono forzati dei segnali distruttivi che dovrebbero portare il ponte in corto circuito, ma questo non avviene perché sono presenti gli interblocchi software abbinati ad alcuni accorgimenti hardware. In pratica si complica un pò il software ma si semplifica l'hardware.
Altra cosa da notare è che il ponte, con quel piccolo motore, è assolutamente freddo, questo anche grazie al circuito di driver realizzato con LM358 che vedete al centro del riquadro rosso sull'immagine del layout della scheda.
Per quanto riguarda l'uso e la spiegazione della sezione L298 della Micro-GT IDE si rimanda al previsto capitolo del corso online "Let's GO PIC!!!" attualmente in fase di stesura.
Una prima miglioria del ponte H presentato si ha montando, el medesimo PCB, al posto si Q1 e Q3 i darlington PNP di tipo TIP127 con l'accorgimento di saldare le resistenze R1 e R3 solo sul lato della base del transistor. L'altro lato va lasciato libero (in infilato nella piazzola per la saldatura) e al reoforo in questione attacchiamo un filo (uno per ciascuna delle due resistenze) da portare a un morsetto a vite da due posizioni a cui faremo pervenire due segnali di comando che arrivano dal microcontrollore.
Abbiamo creato un sistema di inversione di marcia che funziona con una combinazione di quattro segnali e non più due.
i segnali di comando da generare via software sono:
- 0010 per la marcia avanti
- 1100 per la marcia indietro .
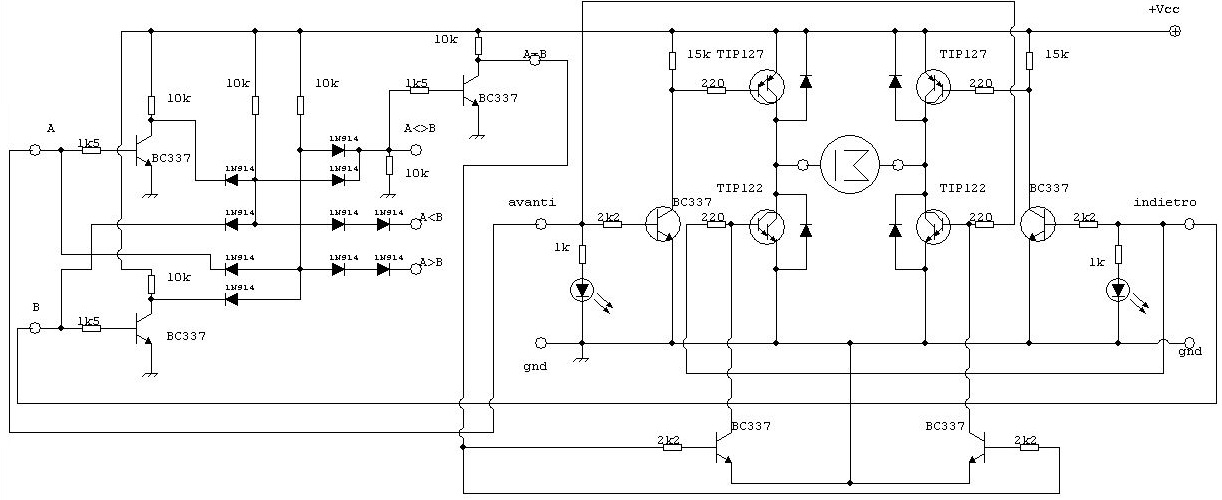
La configurazione che segue può pilotare il motore in senso di marcia e in controllo di velocità PWM, dato che 22Khz, valore di frequenza che ottimizza la potenza trasmessa al motore DC con indotto a 24V, che posseggo e utilizzo, è comunque una frequenza bassa, ben compatibile con quella accetta dai darlington TIP122 e i suoi complementari TIP127.
Lo schema elettrico è il sottostante:
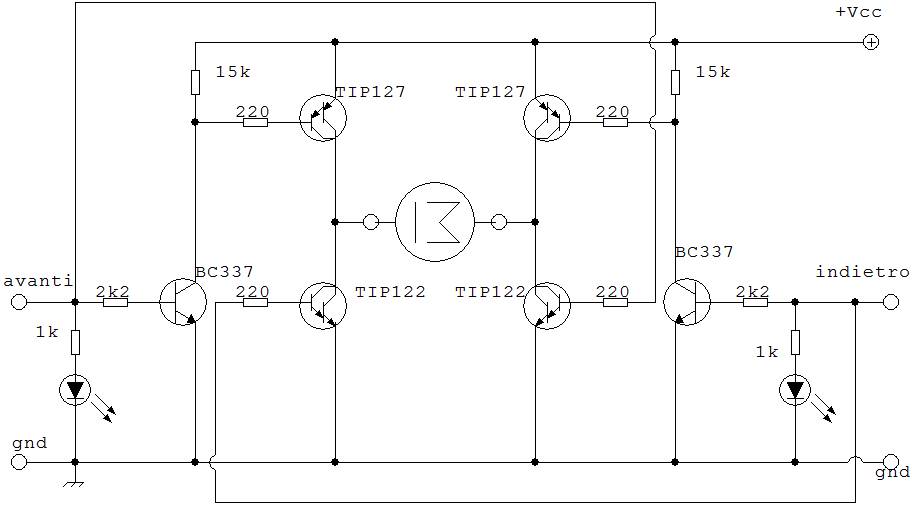
scarica lo schema elettrico in formato FidoCad
I segnali di comando richiesti sono solo 2, rispettivamente avanti e indietro entrambi a 5V dc. I due transistor BC337 rappresentano degli invertitori di segnale, infatti, se un uno logico (di valore compatibile con la rete di polarizzazione posta in base) viene applicato ai morsetti di comando, ovvero alle due resistenze di base tarate per applicazioni di interfacciamento con la logica TTL e quindi anche per i pin di uscita di un microprocessore/microcontrollore PIC.
Le resistenze da 2k2 permetteranno una Ib di circa 2 milli ampere, sufficienti a fare saturare i BC337, in questo caso le Rb dei TIP127 si troveranno quasi a massa e permettendo il passaggio di 10milliampere, sufficienti alla saturazione di questi darlington PNP essi risulteranno trasparenti o quasi trasparenti tra il loro emettitore, connesso a a+Vcc, e il colletore connesso all'indotto del motore.
Seguendo le connessioni si vede facilmente che viene riproposto il pilotaggio a due a due secondo la diagonale del ponte H che permetterà l'inversione della corrente nell'indotto.
Rimane ancora il problema delle configurazione vietate che dovranno essere gestite via software nel firmware del processore, come vede nel filmato youtube collegato all'articolo, dato che un comando "avanti e indietro contemporaneo" continua ad essere distruttivo.
Una soluzione definitiva avviene interponendo una porta ex-nor davanti a uno dei due comandi, se vogliamo che il sistema si metta all'evento in uno specifico senso di marcia, due porte ex-nor, ad entrambi gli ingressi di comando se vogliamo che all'evento di doppio senso di marcia il motore stia fermo.
Una soluzione Hardware per la realizzazione della porta ex-nor con diodi e BJT è possibile e neanche troppo complicata, ma sarà da preferirsi solo se non intendiamo ibridare la tecnologia costruttiva tra transistor e porte logiche TTL o CMOS.
Il circuito integrato che contiene 4 porte EX-Nor a due ingressi costruito in tecnologia LOW POWER SCHOTTKY è il sgs-thomson T74LS266.
Vediamo una soluzione per i segnali di comando conflittuanti
Supponiamo di avere il problema di lasciare passare solo uno dei due segnali si comando quando questi siano contemporaneamente presenti.
Assodato che questa situazione risulta distruttiva, è fondamentale assumere una di queste soluzioni quando si verifichi.
- avanti+indietro -> motore avanti
- avanti+indietro ->motore indietro
- avanti più indietro ->motore fermo
Non ha senso chiedersi quale sia più corretta perché dipenderà dalla specifica situazione, che io normalmente gestisco via software (firmware) all'interno del PIC, come potete vedere dai link ai filmini youtube.
In ogni caso prima di mettere in opera la scheda di controllo, è bene fare dei test del software di comando togliendo l'alimentazione di potenza. Dovremmo vedersi accendere i led di ingresso, uno o l'altro ma non tutti e due. solo dopo avere verificato tutte lo condizioni possibili possiamo chiudere l'interruttore o collegare il morsetto dell'alimentatore di potenza che energizza il motore.
La situazione è nota in elettronica digitale come comparatore di disuguaglianza (uno o l'altro ma non tutti e due) implementato dalla porta ex-or o dalla situazione indicata qui sotto:
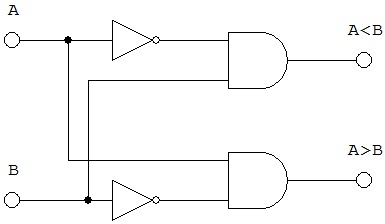
La sintesi della rete logica combinatoria sarà argomento dello specifico tutorial, per il momento vediamo come realizzare questa rete a transistor in modo da poterla porre davanti al precedente schema del ponte H a darlington complementari al fine di risolvere i fortuiti conflitti di comando.
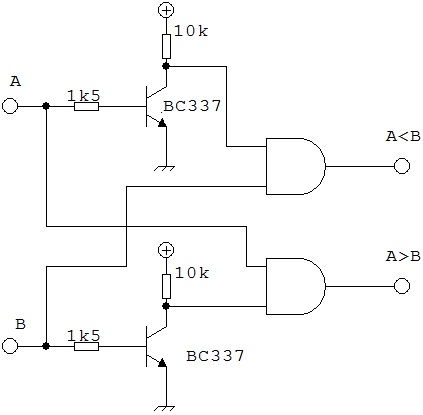
Ovviamente, una volta completato il circuito, i morsetti A e B saranno sostituiti con i segnali in logica TTL (0-5V) provenienti dalle uscite digitali del sistema di controllo PIC, ad esempio la Micro-GT mini.
Se siamo interessati all'interfacciamento con sistemi a tensioni diverse vanno ricalcolate le resistenze di base, raffigurate da 1k5, con il valore che permetta la saturazione del BC337 con 2mA. Come fare è già stato ampiamente discusso e quindi è ora tralasciato.
Vediamo invece come fare sparire le porte AND. Si può procedere in due modi, entrambi funzionali.
- in logica DL, ovvero usando solo diodi
- in logica TTL, ovvero usando transistor in commutazione
La logica DL è molto semplice e non così limitante come potrebbe sembrare. I diodi 1N914 sono i più adatti a questa funzionalità logica ma anche dei comuni 1N4148 potranno andare bene
Le caratteristiche dirette da data book sono:
- IF= corrente diretta 300mA
- RF=resistenza equivalente diretta (deltaV)/(deltaI)=(1-0,72)/(10-5)=140 Ohm
- V =caduta di tensione diretta da 0,6 a 1V .
- Vgamma=0,4V
Le caratteristiche inverse sempre da data book sono:
- Vinv=massima tensione inversa di lavoro =75V
- BV= breakdown voltage, overo tensione inversa di scarica = 100V
- Rr= resistenza in conduzione inversa = (delta V) /(delta I)=(75-25)/(5000-25)= 11MOhm
Nell sostanza è molto vicino al comportamento di un interrutore aperto e chiuso.
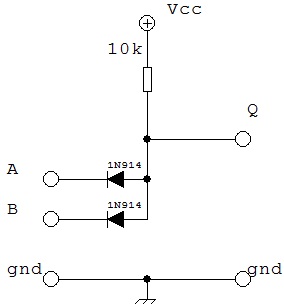
Nello schema sopra c'è una porta AND realizzata con diodi, quindi in logica cosidetta DL (diode logic). L'uscita segue la tabella di verità dell'AND logico in cui il livello basso è pari a 0,6V e il livello alto sarà dipendente dal valore a cui è appesa la resistenza di pull-up, quindi non necessariamente TTL anche se è bene che lo sia.
Ecco il comparatore di disuguaglianza realizzato senza porte integrate:
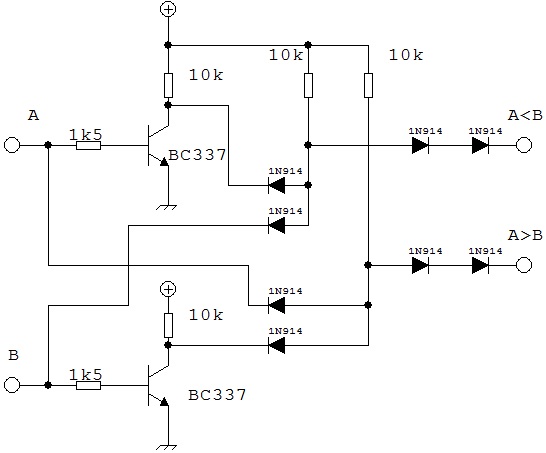
Eseguendo un Nor logico tra i segnali presenti sotto le due resistenze di pullup è possibile prelevare un segnale che realizza il comparatore di uguaglianza, se tale NOR è realizzato mettendo in cascata un OR con un NOT, collegandosi a monte del NOT abbiamo disponibile il segnale alto che segnala al disuguaglianza.
Abbiamo quindi disponibili 4 diverse informazioni all'uscita del circuito:
- A<B
- A>B
- A=B
- A diverso da B
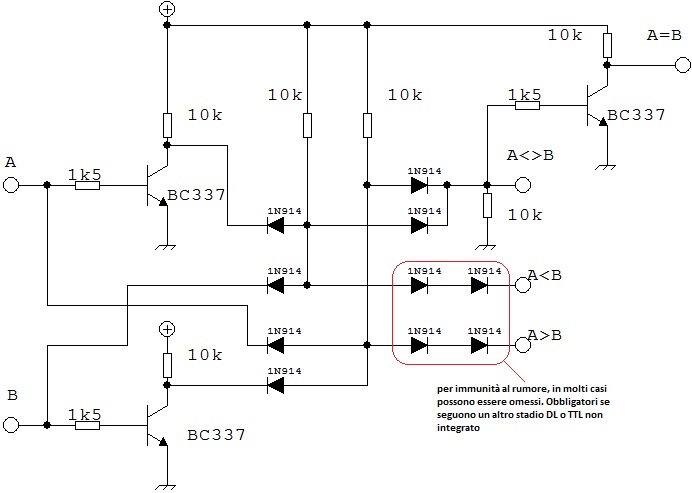
Scarica gli schemi FidoCad dei comparatori TTL
Ora abbiamo tutti i segnali possibili ed immaginabili disponibili per proteggere il ponte H, possiamo quindi procedere assemblando uno stadio che alla fine si comporti da ex-or davanti agli ingressi di comando del ponte a darlington complementari esposto in precedenza.
Nella sostanza abbiamo un ricreato quanto i progettisti de microelettronica hanno fatto alla ST relativamente ai due ponti H inseriti nel noto circuito integrato L298, che è sempre una ottima soluzione per correnti di indotto inferiori a 2A
Eccovi un primo esempio di ponte protetto sull'uguaglianza dei segnali di comando di marcia.
scarica schema elettrico e file FidoCad
Viene lasciato al lettore, come utile esercizio di progettazione, il produrre i ponti H che sfruttano i canali di protezione A<>B, A<B,B>A, individuandone i casi in cui sia necessario usare questa metodologia. Faccio notare che nello schema sovrastante questi morsetti sono stati lasciati liberi e disponibili.
Come piccolo suggerimento posso accennare anche al fatto che alcuni attuatori che dovessero essere comandati simultaneamente alla marcia del motore, ma sotto opportune condizioni, liberano alcuni pin del PIC e semplificano il programma.
Per finire, la presenza dei diodi di ricircolo lasciano sotto intendere un uso in PWM del ponte H.
Versione miniaturizzata del ponte H semplice
Con semplice si intende la configurazione didattica non protetta che richiede l'implementazione degli interblocchi software all'interno del dispositivo di controllo.
Accenno solamente dato che vorrei presentare un articolo a se stante sotto l'insegna "Let's GO PIC!!!", non appena avrò terminato questa e altre pubblicazioni che ho in corso.
Si tratta di un sistema a guida ottica, derivato dal lavoro sulla sedia a rotelle robotizzata per portatori di SLA.
Anche questo progetto è stato premiato al concorso internazionale europeo di zaragoza (Saragozza) in Spagna, dove si è piazzato al primo posto su oltre 100progetti di innovazione tecnologi e ricerca presenti.
Accennando: Una automobilina, su cui ho montato un micro motore/riduttore D.C. recuperato dallo zoom di una vecchia telecamera, è controllato da una Micro-GT mini con a bordo il PIC 16F876.
Nel prototipo sono presenti solo alcune cose come, i fanali, simulati con dei LED, le frecce simulati con LED multicolore, lo sterzo destra e sinistra (ma meccanicamente non implementato per problemi di miniaturizzazione meccanica comunque con segnali presenti e validi, marcia avanti e marcia indietro abbinato al ponte H miniaturizzato di cui si va a discutere.
I segnali di comando la cui spiegazione è ora omessa, arrivano dalla telecamera del notebook in funzione del blinking effettuato con le palpebre del bambino disabile che può usare questo meraviglioso giocattolo. Nessun movimento corporeo è richiesto all'utilizzatore che si presume totalmente immobilizzato dalla patologia...omissis.
Il gruppo G-Tronic ha sviluppato l'interfaccia .net per la cattura e l'elaborazione di questi segnali (presentata nel prossimo Let's GO PIC!!!".
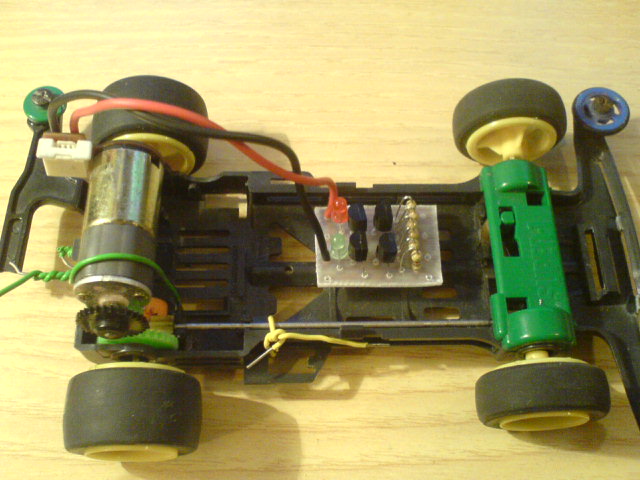
Ecco foto e schema FidoCad del ponte H miniaturizzato:
La versione di PCB mostrata sopra è quella munita di morsetti che risulta più comoda negli assemblaggi ma con ingombro più che doppio rispetto a quella senza morsetti in cui i cavi sono direttamente saldati nel PCB. Si risparmia anche denaro oltre che spazio, ma lo schema elettrico è identico.
Questo ponte H può essere impiegato in tutte quelle applicazioni di asservimento in cui agisce un motore D.C. miniaturizzato. Ad esempio potrà controllore lo zoom di una telecamera, l'apertura e la chiusura di un vano porta CD, orientamento di antenne da interni, ecc. Il ponte può essere applicato in tutte quelle situazioni in cui la corrente di indotto sia minore ad un ampere.

Come vediamo nella foto il circuito è realmente minuscolo e se ci fosse interesse potrà essere ulteriormente ridotto impiegando componentistica SMD, e nei casi in cui risultino inutili eliminando i LED di direzione e le relative resistenze. Questo circuito è un ottimo esercizio di saldatura per le scuole perché impone all'allievo concentrazione e precisione.

i fori rimasti liberi sono per il collegamento dei cavi di alimentazione del ponte, i cavi dell'indotto del motore, e i due cavi per i segnali di comando più una massa in comune tra il dispositivo di controllo e il ponte H.
Questo circuito è fatto per interfacciarsi a motori così piccoli che anche se controllati in PWM, segnale accettato dagli ingressi di questo ponte, non ha bisogno dei diodi di ricircolo data la bassa energia in gioco.
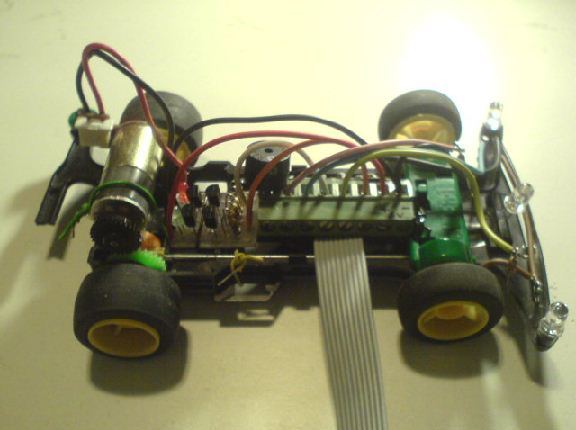
Come possiamo vedere dall'immagine il modellino è molto piccolo, deriva infatti dal telaio della nota mini4WD. Quelle automobiline non hanno però la marcia indietro e montano motori molto, forse troppo, rapidi, la cui riduzione è composta dalla sola catena cinematica dei due ingranaggi collegati all'albero motore. La meccanica era dunque estremamente inadatta alla nostra applicazione.
Si è preferito cambiare direttamente il motore forte del fatto che avevo disponibile il micro motore dello zoom della videocamera che vedete nella foto.
L'alloggiamento non è stato troppo complicato anche usando solo mezzi di fortuna.
Durante le fasi di test abbiamo anche bloccato le ruote, leggasi bloccato l'asse del motore, e anche in questo caso il ponte ha tenuto.
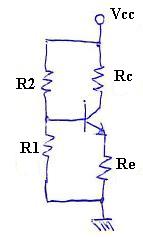
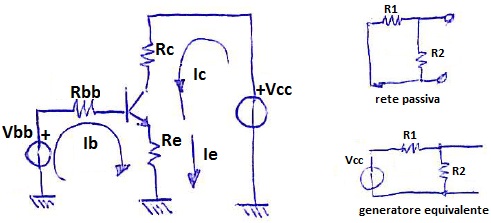
Utile esempio di polarizzazione.
Determinare R1, R2 per avere Icq=2mq, sapendo che i parametri del BJT sono Bf=50 e Vcc10Volt.
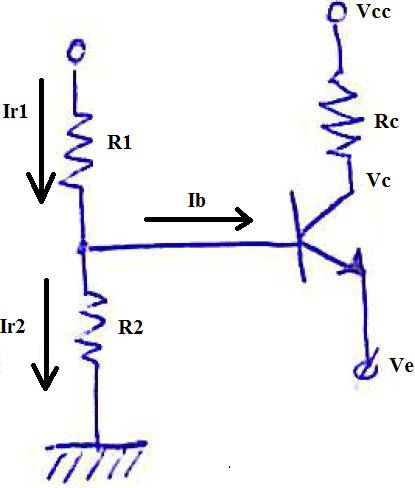
La rete di polarizzazione è indicata nello schema sottostante.
Applicando il teorema di thevenin ricavo il circuito semplificato avente una unica maglia equivalente in ingresso alimentata con Vbb (tensione del generatore a vuoto equivalente di thevenin) e una unica Rbb (resistenza equivalete della rete della maglia ingresso, resa passiva, vista dalla porta Base-Massa.
si ottiene: Rbb= (R1*R2) / (R1+R2) e Vbb = (Vcc*R2)/(R1+R2) in questo caso è il semplice partitore di tensione.
Il teorema di Thevenin (detto del genarore equivalente di tensione) permete di calcolare quella equivalente rete composta da un'unico generatore di tensione di tensione, calcolato tendo conto degli effetti di tutti i generatori della rete sovrapposti alla porta in esame, con carico annullato (staccato), si deve quindi isolare la parte del circuito di interesse dalla rete complessiva e applicare su quella porta (priva di carico) il principio di sovrapposizioe degli effetti.
Il generatore così trovato andrà collegato in serie alla unica resistenza equivalente che si trova rendendo passiva la parte di rete in esame, manovra che si realizza mettendo VIRTUALMENTE in corto i generatori di tensione e a prendo gli eventuali generatori di corrente. La manovra di spegnimento virtuale dei generatori si può eseguire semplicemente togliendo i cerchietti attorno al simbolo.
Una volta che si è ottenuto l generatore reale di tensione a vuoto equivalente secondo thevenin, lo si ricollega alla rete ottenendo questo schema:
Ic=B*Ib
Ie=Ib*(1+Bf)=Ib+Bf*Ib
L'equazione della maglia di ingresso è:
Ib*Rbb+Vbe+Ie*Re-Vbb=0
L'equazione della maglia di uscita è:
Ic*Rc+Vcc+IeRe-Vcc-00
Sul sistema che ho attenuto impongo le condizioni del problema, ad esempio sulla seconda equazione Ic=2mA
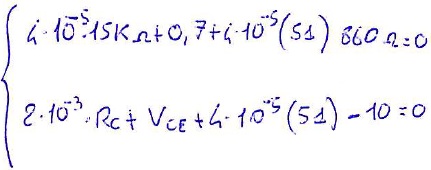
Il sistema risultante è:
Ora devo parametrizzare il sistema al fine che esso abbia al massimo 2 incognite (attualemente ne presenta 4).
Supponiamo quindi che R1=R2=30K da cui Rbb=15K.
Imponiamo inoltre Re=860 Ohm.
Rimangono, come richiesto, solo due incognite
Vce e Ib.
Supponendo inoltre che il componente si trovi in zona attiva diretta, allora è nota anche la Ib, trascurando come sempre in questi esempio le correnti di dispersione.
Ic=Bf*Ib
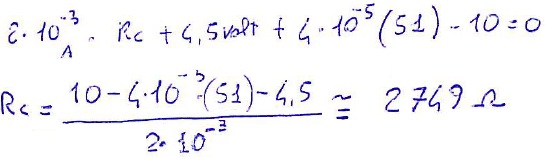
da cui si ricava Ib= Ic/B =2*10^(-3) / 50 =4*10^(-5) = 0,00004 A
Sostituendo i valori trovati nel precedente sistema si ottiene:
Se Rbb<<(1+Bf)*Re
Si ha Vceq= (Vcc-Ve)/2 = (Vcc-Re*Iq)/2=4,35V
Quindi:
Vcb=4,35-0,7=3,65V >0
Ne consegue che la giunzione CB è polarizzata inversa e quella di emettitore è polarizzata diretta. In queste condizioni il BJT è in ZONA ATTIVA DIRETTA come ipotizzato.
In definitiva si ha:
Il dimensionamento circuitale per ottenere una corrente Ic sul carico di 2mA come richiesto, mantenendo il transistor in zona attiva diretta è riportato nello schema qui sotto.
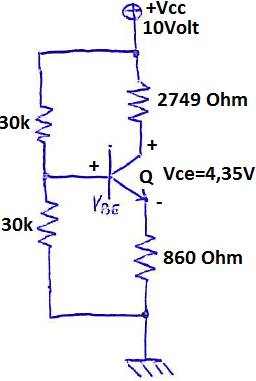
Con questo schema che riporta i valori l'esercizio/esempio è concluso.
Calcolo della Ib di saturazione.
Esiste una formula diretta che consente di calcolare la corrente da iniettare in base per portare il transistor BJT in zona di saturazione.
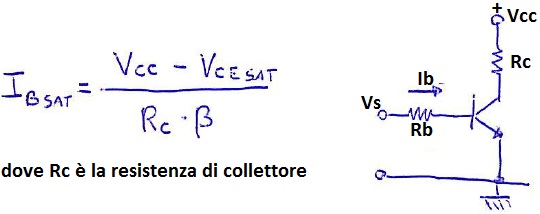
Una volta trovato questo valore di corrente si può trovare il valore dela resistenza che lo impone tramite l'equazione :
Ib*Rb+Vbe-Vs=0
Ricavata ovviamente dalla seconda relazione di kirchhoff sulla maglia di ingresso.
Poiché Bf è un parametro che può essere fortemente variabile anche per transistor della stessa serie è necessario per i calcoli basarsi sul valore minimo garantito dal costruttore.
Per progettazioni piùprecise è necessario testare il componente con un multimetro in grado di dare una stima di hfe.
E' importante anche sapere che Bf può non essere costante in funzione sia della temperatura che della corrente di collettore.
I transistor di segnale hanno hfe, ovvero Bf, molto elevate, mentre i transistor di potenza (più adatti a lavorare con elevate tensioni e correnti di collettore) ha un valore più modesto.
Un modesto valore di di Bf implica una maggiore corrente di base per portare il componente alla saturazione.
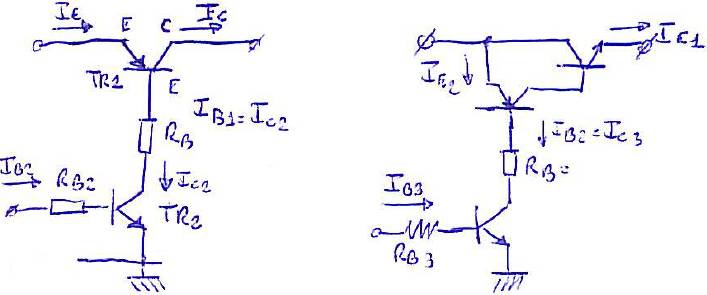
Per ovviare a questo inconveniente si usa lo stratagemma di collegare (nel medesimo contenitore) due transistor in cascata e tale configurazione è detta darlington.
connessione Darlington.
Due transistor omologhi oppure complementari integrati in unico contenitore si comportano come un unico transistor con BT=Bf1+Bf2
Lo schema elettrico è didatticamente parlando il seguente:
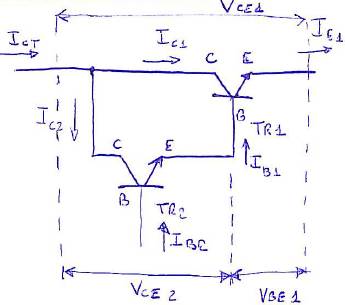
Siccome vale Vce1= Vce2+Vbe1 il transistor di ingresso difficilmente ed è questa causa du dissipazione termica nelle applicazioni ON/OFF.
Se aumentiamo il numero dei transistor questo difetto viene incrementato così che si preferisce passare a configurazioni con transistor complementari.
Ecco il disegno, fatto a mano, del transistor darlington TIP122, comunemento identificato come NPN.

Come già detto satura con una corrente di 10mA in base ma ne può accettare anche 100mA impulsivi .
scarica databook -> TIP122
Effetto Early.
Aumentando Vce aumenta molto la tensione di polarizzazione inversadella giunzione BC, al contrario, la tensione di polarizzazione diretta della giunzione BE rimane praticamente invariata a circa 0,7Volt (Vbe=cost in zona attiva o saturazione), ci sono due conseguenze.
1) Aumenta Ib a causa dell'aumento del gradiente di elettroni in base
2) Riduzione della corrente di ricombinazione in base.
Entrambi gli effetti contribuiscono ad aumentare Ic.
Vediamo con un grafico l'effetto early sulle curve caratteristiche.
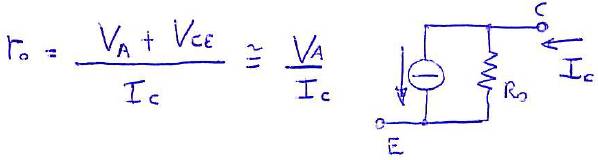
Caratteristiche di uscita ad emettitore comune.
Detta Ro la resistenza di uscita del transistor ad emettitore comune, si ha che questa è rappresentata dalla pendenza della curva.
Ro ha importanti ripercussioni sul funzionamento del transistor come amplificatore (un buon amplificatore deve avere Ro più basso possibile per meglio trasferire la potenza al carico).
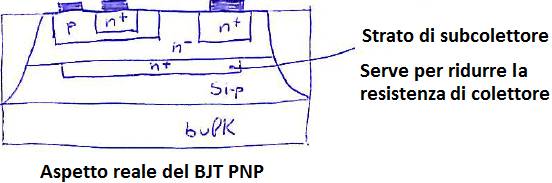
Attenuazione dell'effetto early
L'effetto early è dannoso per il funzionamento del transistor perché comporta una difficoltà nel trasferire potenza tra il BJT e il carico.
Una dissipazione interna inoltre fa aumentare la temperatura del componente e delle sue giunzioni, deviando ulteriormente le curve caratteristiche.
Per ovviare a ciò il costruttore realizza il BJT in modo che il colettore sia meno drogato della base.
In definitiva il BJT debe essere costruito assimetricamente per quanto riguarda le densità "N" dei drogaggi delle zone di emettitore, Base, collettore.
Ne>>Nb>>Nc
Il BJT non è quindi un componente simmetrico come si potrebbe pensare associandolo per analogia ai due diodi anod-anodo (NPN) o catodo-catodo (PNP).
Esercizio riassuntivo completo.
Vediamo come trovare il punto di lavoro e quale è la sua deriva sulla retta di carico in funzione della variazione del parametro Bf che ricordiamo essere corrispondente al guadagno statico di corrente ai parametri ibridi.
Lo schema elettrico è:
Vengono dati i seguenti parametri:
B1=50 (prima condizione)
B2=250 (seconda condizione)
Travare il punto di lavoro Q=(Ic,Vce)
Applico Thevenin alle maglie di ingresso, ottengo Rbb=(20*3)/23 = 2k6 e aanche Vbb=(Vcc*3k)/(20k+3k)=2,6V
Quindi si ha che la maglia M1 di ingresso è governata dall'equazione:
IbRbb+Vbe+Ie*Re-Vbb=0
trascurando le correnti di dispersione, Icbo e Iceo, vale:
Ie=(Bf1+1)*Ib
sostituisco Ie
IbRbb+Vbe+Re(B1+1)*Ib-Vbb=0
Ib*Rbb + (B+1)*Ib*Re=Vbb-Vbe
Ib*[ Rbb+(B+1)*Re]=Vbb-Vbe
Mettiamo in evidenza la corrente di base
Ib=(Vbb-Vbe)/(Rbb+(B+1)*Re )
sostituiamo i valori noti
Ib*(2k6+1k*(B+1))=1,9V
Ib=1,9/(3600+1000*B)
Adesso possiamo eseguire due calcoli distinti, uno per B1=50 e uno per B2=250
Ib(50)= 1,9/(3600+1000*50)=35uA
Ib(250)=1,9/(3600+1000*250)=7,49uA
Ora risolvo le maglie di uscita e trovo Vce
-20+5k*B*Ib+Vce+(Bf+1)*1k=0
Vce= 20-5k*B*Ib-(Bf+1)*Ib*1k
Ora dobbiamo parametrizzare le due variabili B e Ib, che comunque dovranno essere impostate in maniera coorente.
Ad esempio:

Ora trovo le due correnti Ic
Ic(50)= 50*35*44*10-6 =0,001772A.
Ic(250)= 250*7,49*10-6 =0,0018725A
Conclusioni: E' entrata in gioco una retroazione negativa ovvero il sistema tende ad opporsi alle variazioni di certe grandezze Ic e Vce modificandone pesantemente delle altre in questo caso Ib.
Regola pratica "Rule of tale" per determinare la R di polarizzazione.
Usiamo una regola pratica che ci permette di determinare i valori accettabili delle tre resistenze di polarizzazione (estendibile a quattro R).
Vengono assegnate la Ib e la tensione di alimentazione.
- Ib=100uA
- vcc=10V
Lo schema in esame è nello schema sottostante.
Nella progettazione corretta si deve ottenere:
Diamo la "RULE OF TALE" (regola d'oro) a cui attenersi per sviluppare concretamente i circuiti di polarizzazione.
dato IR1 diverso da IR2.
- IR1 >=10IB (meglio se 100)
- VB>=2V
- Vc a metà strada tra Vcc e Ve.
Vediamo un esempio di applicazione della regola d'oro.
Considero una rete a 4 resistenze incognite, quindi da calcolare.
Sono date Ic=2mA e BF=50 Vcc=10V.
Impongo la regola 2
VB=3V
Ne consegue VE=VB-VBE=2,3V
RE=VE/IE
per definire RE=2,3V/2,04mA
IE=(B+1)*IB Ic=B*IB
RE=1127Ohm Ic/B=IB
IB=40uA IB=0.04mA IE=2,04mA
Impongo la regola 1
IR1=10*IB=Vcc/(R1+R2)
considerando la IB trascurabile
10*40uA=10V/(R1+R2)
R1+R2=10V/(0,0004)=25k
R1+R2=25k -> VB=3V=Vcc*R2/(R1+R2)
quindi troviamo la R2
(3*25000)/10=R2
da cui R2=7500 Ohm
per differenza ricavo R1 (25000-7500)=R1 R1=17500
Per calcolare Rc applico la terza regola.
Vc=(Vcc-Ve)/2 = 3,85+2,3=6,25V
con 2,3 ho indicato l'offset
Rc=(Vcc-Vc)/Ic = 3,85/(2*10-3A)=1925 ohm
Abbiamo trovato tutte le 4 le resistenze.
Lo specchio di corrente.
Le resistenze sono ingombranti da integrare nei C.I. quindi delle volte si preferisce simulare con l'ausilio di 2 BJT collegati a specchio di corrente.
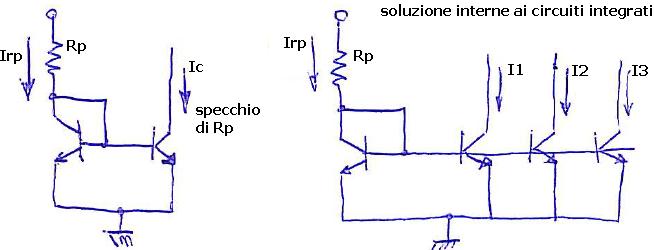
.Lo specchio di corrente copia una corrente programmata tramite una resistenza inserita in un punto di un circuito su un altro punto del circuito, sia esso esterno che interno ad un circuito integrato come mostrato nelle immagi sovrastanti.
Vediamo un esercizio di dimensionamento dello specchio di corrente.
Esercizio:
Dimostrare che Io=Ip
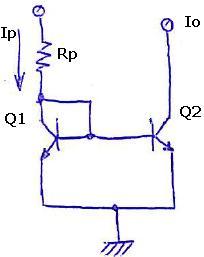
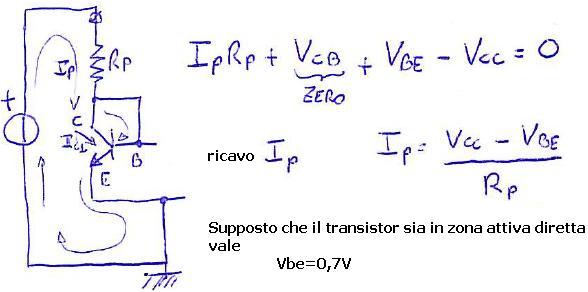
Osserviamo il nodo a cui è applicata la Rp e applichiamo la prima legge di kirchhoff.
scrivo l'equazione della maglia esterna tra Vcc e massa (noto che il collettore è forzato ad esser equipotenziale alla base.
supponiamo che Q1=Q2 (situazione molto teorica)
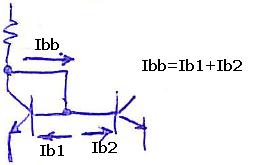
Ip=Ic1+IBB
IBB=IB1+IB2
IB2=Is/B*e(Vb/VT) IB1=IB2.
quindi Ip=2*IB+IC1 dalla relazione IC1=B*IB si ha:
Ip=(B+2)*IB quindi IC2=Io=B*IB
evidenzio Ip
Ip=(B+2)*Io/B
evidenzio Io
Io= (Ip*B)/(B+2)
si ottiene:
Se torno indietro di un passaggio e suppongo, come sempre avviene, che B>>2 allora B/(B+2)=1 o meglio circa 1.
quindi Io=Ip ed ho raggiunto lo scopo di copiare dentro ad un circuito integrato un valore di corrente in un punto specifico.
Tale valore di corrente è programmato fuori dal circuito integrato tramite una singola resistenza.
Questo è lo scopo dello specchio di corrente.
Multivibratore astabile.
Questo semplice circuito è una pietra miliare di tutti i corsi di elettronica, costituisce infatti una tappa obbligata nello studio del funzionamento dei transistor BJT. Il contenuto teorico è abbastanza vasto e difatti costituisce spesso argomento di temi d'esame. Concettualmente parlando si tratta di due gruppi RC (in questo caso calcolati per una costante di tempo di 1 secondo) che forniscono mutualmente alle basi dei transistor una tensione crescente fino al valore Vb=0,7 volt a cui la giunzione base emittore va in conduzione. Il primo transistor che va in conduzione (entrando in saturazione) interdice quello del ramo opposto che darà la possibilità al ramo opposto di essere pilotato dalla tensione crescente presente al reoforo positivo del condensatore ora in carica. Una volta raggiunti gli 0,7 volt il transistor antagonista satura con l'effetto di portare a massa ( a meno di 0,2 volt tra collettore e emettitore) il condensatore del ramo opposto scaricandolo e innescando cos il ciclo continuo. Benché l'onda ottenuta non sia proprio squadrata ben si presta a moltissime applicazioni anche di elettronica digitale.
Sviluppiamo questo semplice progetto usando i due Cad attualmente più in voga, ovvero FidoCad, per le realizzazioni domestiche e Eagle per le realizzazioni professionali. In entrambi i casi il supporto PCB risulterà estremamente compatto.
Nella foto successiva vediamo l'oscillatore realizzato in FidoCad. Date le misure estremamente compatte il circuito risulta super economico ed anche un ottimo esercizio di manualità in assemblaggio per i principianti.
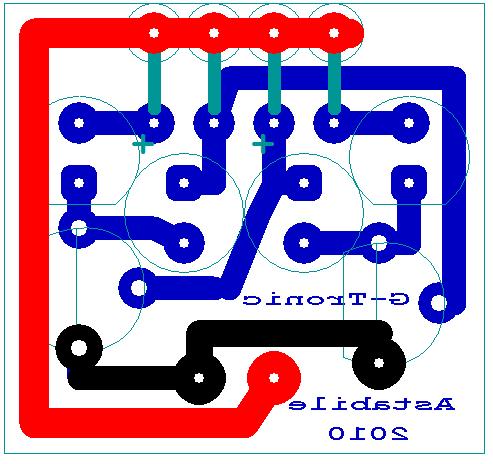
Circuito stampato realizzato in FidoCad dell'oscillatore a BJT (multivibratore astabile, configurazione didattica).
Basetta presensibilizzata 100*160mm cpn 35 esemplari, realizzando questo stampato possimo soddisfare una intera classe scolastica ed avanzare anche qualche esemplare. La spesa per questa prova di laboratorio è davvero ridotta. Puoi scaricare i file FidoCad sia a singolo esemplare che multiplo dal link sottostante.
Scarica il progetto FidoCad -> oscillatore BJT.

I fili lunghi e sottili, ricavati sezionando un cavo flat multiconduttore, sono necessari perché l'esemplare in figura è destinato alla realizzazione degli occhi oscillanti del pupazzo Mr. Funky presentato in questo sito.
La versione ancora più compatta è realizzata in Eagle ed è scaricabile dal prossimo link.
Download File Eagle e gerber -> Oscillatore Eagle.
Inverter didattico.
L'applicazione che segue è già stata da me pubblicata e viene qui riportata per la sua coerenza con l'argomento trattato.
Voglio sottolnieare che si tratta di una applicazione didattica che mette a disposizione scarsa potenza e una discutibile stabilità ma è comunque una certezza che nei limiti indicati svolgerà la sua funzione.
L'articolo completo si trova a questo indirizzo:
Visita l'articolo dell'inverte didattico su questo sito -> Inverter didattico con BJT e darlington su grix.
Mentre la versione meno elaborato dello stesso me aperta a tutti i naviganti si trova qui:
inverter didattico con BJT e Darlington -> Clicca per leggere l'articolo
Lo schema di principio è riportato nella struttura a blocchi qui sotto. Si tratta dello stadio driver dello stadio di potenza a Darlington. In sostanza viene generata un'onda quadra (sarà quasi quadra nel circuito reale) e la sua complementare, ovvero il segnale che chiamiamo Q e il complementare Q-negato.
L'obbiettivo è raggiunto con l'oscillatore astabile a transistor BC337 del paragrafo precedente.
postiamo qui il semplice schema elettrico e studiamone il funzionamento di base. premetto che sarà possibile sostituire i Darlington praticamente con qualsiasi dispositivo che abbiate in magazziono purché sia fatto lavorare in una zona di saturazione ben certa, quindi bisognerà ritoccate i valori delle resistenze di base (gate se usate dei MOS). Il valore corretto qui non lo posso dire perché dipenderà da cosa usate come switch...ma di certo vi servirà come utilissimo esercizio. Personalmente io uso spesso i Darlington TIP122 perché offrono un buon rapporto qualità potenza e prezzo, nonché perché ne ho i magazzini pieni. Con 10 mA in base sono in buona zona saturazione, ovvero la tensione tra il collettore e emettitore è ridotta al minimo in modo che possona essere assimilati a contatto meccanico di un relè (magari fosse proprio così ma si approssima bene).
Passiamo all'analisi dello schema elettrico e vediamo come i componenti reali assolvono le funzioni di quelli dello schema a blocchi. Facciamo anche un minimo di spiegazione sul dimensionamento.
Download schema elettrico in FidoCad Download schema immagine .gif
{kind=link}
Nota preliminare: Tra la massa e la presa centrale del trasformatore potrete collegare qualsiasi fonte continua di valore dettatao dal buon senso, ad esempio compresa tra 9 e 24 volt. Potrete collegare ad esempio in maniera diretta un piccolo pannello solare dimostratico, come ho fatto durante il collaudo, avendo l'accorgenza in questio caso di non caricare l'uscita, ma di usarlo solo a scopo dimostrativo, ad esempio se la vostra scuola partecipa a manifestazioni fieristiche collegatici in maniera permanente un tester commutato sulla scala 600 A.C.
La porta N1 è un invertitore formato dal transistor BC337 del ramo di destra e dalla sua resistenza in collettore, il cui valore sarà tarato sia per non superare la massima corrente di collettore del BC337 che per far saturare correttamente il darlington, si nota che nello schema esiste un gruppo formato da 1K per la corrente di collettore e (330 Ohm+1K) per la base del TIP122, ma un'ottima variazione che poi si è utilizzata nel progettazione della basetta è di usare una sola resistenza di 330 Ohm al posto di quella da 1K e la base del TIP122 sarà collegata direttamente al collettore del BC337.
La porta N2 è un invertitore composto dal transistor del ramo di sinistra e dal suo gruppo resistivo di collettore il cui dimensionamento sarà per simmetria identico a quanto sopraindicato.
Le basi tempo sono formate dai circuiti connessi alle basi dei BC337, ovvero la serie del resistore fisso nello schema riportato a 12K e dal punto di regolazione a trimmer del valore di 2,2K, in serie alla capacità da 2,2uF elettrolitico. Nella realtà sarà preferibile allargare la finestra di regolazione aumentando il valore della resistenza variabile a 4K7 e riducendo di conseguenza quella fissa a 10K. Il valore della capacità è preferibile sia 4,7uF allo scopo di partire da un valore più prossimo a 50Hz prima di effettuare qualsiasi taratura per la quale è necessario un oscilloscopio.
I collegamenti tra le porte di inversione garantiscono che, quando il transistor TR1 di destra è saturo, il transistor TR2 di sinistra è interdetto, e viceversa.
Approssimativamente, il periodo di tempo durante il quale TR1 è interdetto è fornito , in secondi, da 0,7 * R * C, e per simmetria lo stesso tempo è di interdizione per TR2.
In questi oscillatori astabili il periodo di oscillazione è dato da T=1,4 * R * C dove R è il valore totale del trimmer con aggiunto il valore della resistenza fissa posti direttamente in serie alla capacità.
La frequenza di oscillazione è data ovviamente dall'inverso del valore ottenuto per il periodo f= 1/T.
Certamente si noteranno degli scostamenti tra il valore teorico calcolato del periodo e quello visualizzato dall'oscilloscopio a causa delle tolleranze sia dei resistori che delle capacità, ma un'azione di taratura sui trimmer porterà la frequenza agli attesi 50Hz e il duty cycle al 50%.
Si noterà che il fronte di salita della tensione di uscita è arrotondato, questo inconveniente può essere attenuato con modificazioni del circuito che restituiranno un'onda quadra perfetta, ad esempio con l'ausilio di diodi zener, o utilizzando un Flip-Flop o altro, queste modificazioni aumenteranno la stabilità della frequenza della tensione di uscita.
Anche se il circuito può essere soggetto a derive termiche o a necessità di ritarature il suo funzionamento è sicuro e la realizzazione molto semplice pertanto è usatissimo come generatore di onde quadre (o quasi quadre).
Interdittore di linea.
ho denominato "interdittore di linea" un insieme di transistor BJT di segnale posti in modo che pilotando un NPN con i 5V di uscita del pin del PIC si faccia o meno saturare un PNP che mette di conseguenza in conduzione la linea in cui è presente il segnale TTL. In alcuni miei progetti viene proposta questa soluzione con due BJT che danno un ottimo spunto didattico data dall'eleganza circuitale. Nel progetto del selettore di due canali analogici a BJT, presentato sempre su Grix, di cui ho posto il link all'inizio dell'articolo, usavo un solo transistor NPN, operante in zona saturazione/interdizione il cui collettore era connesso al nodo centrale di una pseudo serie di resistenze operanti come impedenze aggiuntive alle linee analogiche, quindi quasi trasparenti. L'interdittore di linea qui proposto ha una complessità circuitale leggeremente superiore.
Vediamo lo schema.
Alla linea a cui è connessa R4 giunge un segnale stazionario ON/OFF dal pin del microcontrollore, quindi da 0 a 5 Volt. Al medesimo punto è connesso anche il diodo LED verde, con la sua resistenza da 10k (farà una luce bassina ma non abbiamo interesse ad alzarla, a meno che questo LED non venga portato a qualche pannellino frontale).
La maglia costituita dal pin alto dell'uscita del PIC, la resistenza R4, la giunzione Vbe, soddisfa l'equazione:
Ib R4 - Vbe - Vrb1 = 0
Dove con Vrb1 si intende la tensione presente al pin del PIC quando l'uscita è alta. Mettendo in evidenza la corrente Ib si ottiene:
Ib= (Vrb1 + Vbe)/R4
sostituendo i valori noti all'interno dell'equazione si ottiene:
Ib = (5V-0,6V)/1500 = 2,9 mA
Questa corrente garantisce una saturazione abbastanza profonda del BC337 che alle misure, come ai datascheet mostrano un hfe mai minore di 250 ( a volte raggiunge i 350), per una corrente Ic max di 0,8 A.
In queste condizione di pilotaggio della base la tensione Vce scende a valori molto bassi (mai maggiori di 0,2V) quindi praticamente collega a massa la resistenza posta in base del BJT PNP indicato con Q2. Al fine di non distruggere la giunzione B-E viene inserita la R6, la maglia di base va soggetta a calcoli simili a quelli visti per l'NPN, e data l'analogia circuitale si avranno in uscita dalla base circa 2 milliampere. Dato che questi due milliampere vanno verso massa tramite le giunzionei tra collettore e mettitore dell'NPN la soluzione non è accettabile come stadio di ingresso di segnali audio. Questi subirebbero una perdita non trascurabile, cosa invece insignificante in un segnale in tensione fissa alta a 5 Volt o a onda quadra come nel nostro caso.
L'oscilloscopio dimostra infatti un'ottima resa del segnale tra emettitore e massa (quindi a monte) e collettore massa (quindi a valle) del circuito di interdizione di linea. Le forme d'onda sono infatti praticamente uguali.
Vediamo alcuni filmati relativi ai
corsi di programmazione dei PIC con la Micro-GT versatile IDE.
Auguro a tutti un buon divertimento e un proficuo studio
Marco Gottardo as adnoctis .
![]() This opera "Beginners BJT" is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike
3.0 Italy License
This opera "Beginners BJT" is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike
3.0 Italy License
Concorso vinci il PCB della Micro-GT
Sul link seguente troverai le condizioni per concorrere alla vicinta el circuito stampato della Micro-GT presentata in questo articolo.
Leggi attentamente le condizioni per partecipare e riceverai via posta il tuo esemplare.
http://www.gtronic.it/energiaingioco/it/scienza/vinci_Micro-GT.html
Per gli utenti che volessero recarsi in visita a Padova, visitate il sito di jenny tramite il link sottostante.