 |
Macchine elettriche |
|

Macchine Asincrone.
MACCHINE ASINCRONE. Martedì 12 luglio 2005
download file "macchine sincrone.doc" download originale manoscritto formato pdf
Le macchine asincrone sono di tipo isotropo. Il rotore è privo di sporgenze (salienze) come lo statore
Lo statore è munito è munito di avvolgimento distribuito aperto di tipo polifase.
Lindotto è sul rotore .
Linduttore è statorico (alimentazione esterna).
Questa condizione è opposta rispetto alle macchine sincrone. Qui non vi sono parti alimentate in continua (lo era linduttore delle sincrone).
La teoria delle macchine asincrone viene sviluppata con riferimento alle convenzioni del motore.
|
A differenza della macchina sincrona, nel funzionamento a regime permanente la velocità di rotazione di rotazione della macchina asincrona pur dipendendo dalla frequenza della tensione di alimentazione dello statore e del numero dei poli è funzione anche del carico.
|
La velocità di sincronismo rimane per le macchine sincrone:
Velocità di sincronismo con circuiti rotorici (indotto) aperti e rotore bloccato.
Le fasi sono collegate a stella e il rotore è aperto e bloccato.
MODELLO DEL M.A.T. RELATIVO AD UNA FASE (CIRCUITI ROTORICI APERTI E ROTORE BLOCCATO)
Quando gli assi magnetici sono affacciati la macchina asincrona è modellabile come n trasformatore.
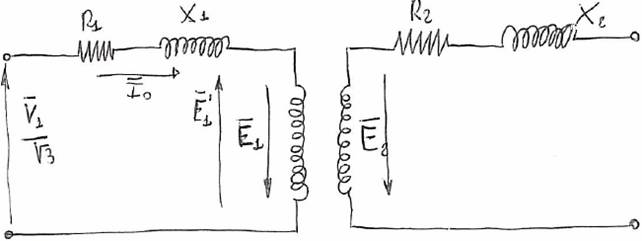
Nota bene: vale solo se ogni fase statorica è affacciata alla corrispondente fase di rotore.
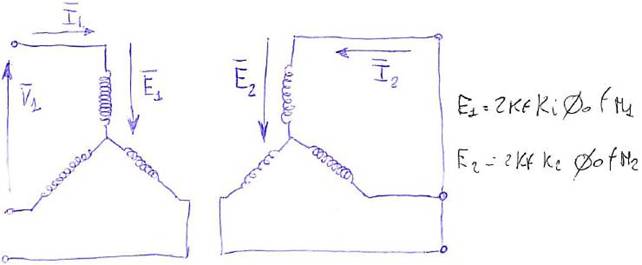
Per ogni fase vale lequazione elettrica:
Formalmente è la stessa equazione che governa un trasformatore a vuoto con rapporto spire t.
Vista la simmetria elettrica e magnetica è possibile fare riferimento ad una sola fase e tracciare in analogia al trasformatore monofase lo schema della figura sovrastante.
|
Lanalogia trasformatore macchina sincrona vale nelle ipotesi che la fase di rotore sia affacciata alla fase di statore ossia i relativi assi magnetici. Siano allineati.
|
Negli istanti in cui le fasi non sono allineate lanalogia non è valida perché i flussi che produce E1 e E2 non è istante per istante ugualmente concatenato tra primario e secondario.
FUNZIONAMENTO DEL M.A.T. CON CIRCUITI ROTORICI IN CORTO CIRCUITO E ROTORE BLOCCATO.
Si faccia lipotesi che il flusso Øo sia mantenuto costante e che i circuiti rotorici sono aperti.
La terna simmetrica di f.e.m. di rotore Eo da luogo a una terna equilibrata di correnti I2 che produce una f.e.m. a gradini rotante lungo il tra ferro con la stessa velocità e lo stesso verso della f.m.m. rotante di statore. Infatti tale f.m.m. si comporta, essendo il rotore bloccato, come una f.m.m. di reazione di indotto di una macchina sincrona di cui la f.m.m. di statore rappresenta la f.m.m. di induttore.
Rispetto a un riferimento solidale con lo statore, landamento temporale della f.m.m. rotorica è individuata da un vettore M2 di valore massimo:
![]()
I pedici 2 indicano che tutto è riferito al rotore.
La f.m.m. (forza magneto motrice) M2 essendo creata dalla correnti I2 indotte da Øo, tenderebbe, per la legge di Lenz ad annullare ad annullare Øo;
poiché tale fluso è supposto costante, le fastidi statore devono neccessariamnete richiamare dalla rete una nuova terna di correnti I12 tali da mettere in gioco al tra ferro una f.m.m. la cui fondamentale M12 vale:
![]()
Quindi si ottiene:
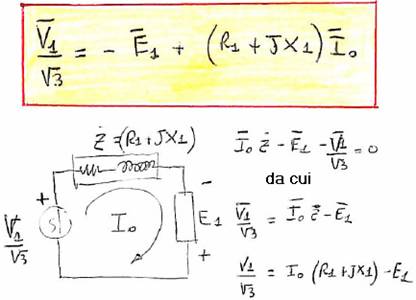
Si può scrivere lequazione della maglia di statore (induttore del M.A.T.)

Analogamente possiamo scrivere lequazione valida per ogni maglia di rotore (indotto del M.A.T.):
Data lipotesi di flusso Øo e quindi E1 costante per essere valide le due equazioni di maglia la tensione V/√3 deve avere un valore diverso per il caso di rotore bloccato rispetto al caso di rotore bloccato e circuiti rotorici in corto.
Dato che la tensione è imposta dalla rete, sarà il flusso a variare.
Passando da Øo al valore Ø a carico; le f.e.m. risultano pertanto:
Si ha una terna simmetrica equlibrata di f.e.m. E2 che danno luogo a una terna equilibrata di correnti I2 che produce una f.e.m. a gradini rotante lungo il traferro con la stessa velocità e stesso verso della f.m.m. rotante di statore.
Infatti la f.m.m. di reazione è come nelle macchine sincrone.
Quando i conduttori sono percorsi dalla corrente I e immersi nel campo B (nel rotore) ad essi ortogonali, sono sede di forza tangenziale che indicano una coppia risultante che porta in rotazione il rotore con n<no per la presenza di attriti , se n>no allora allalbero cè una coppia esterna che la fa girare
FUNZIONAMENTO CON CIRCUITI ROTORICI IN CORTO CIRCUITO E ROTORE IN MOVIMENTO.
Supponiamo che al rotore non sia applicata alcuna coppia resistente e che non vi sia neppure alcuna coppia motrice.
I conduttori del rotore vengono percorsi da una corrente ed immersi in un campo magnetico ad essi perpendicolare, essi sono sede di forze tangenziali che danno luogo ad una coppia risultante.
Essendo le correnti di rotore create sulla base della legge di Lenz esse si oppongono alla causa che le ha generate (cioè al campo prodotto dallo statore è rotante alla velocità di sincronismo no) essa tende a diminuire la velocità relativa tra campo e rotore, ossia a trascinare il rotore nello stesso verso del campo di statore.
In definitiva la coppia porta in rotazione il motore con una velocità del rotore pari a n che per la presenza di perdite e attriti è minore di no anche in assenza di coppia resistente applicata allalbero.
La frequenza delle fem indotte nei conduttori di rotore risulta:
Dove no = velocità del campo magnetico rotante di rotore e di statore.
E n = velocità meccanica del rotore
E infine p= numero di coppie polari.
Posto :
Si ha la relazione tra la frequenza di rotore e la frequenza di statore.
Con il seguente significato dei simboli:
- fs = frequenza di rotore
- f = frequenza di statore
- s = scorrimento.
La fem indotta e la reattanza di dispersione Xs dipendono entrambe dalla frequenza:

Alle correnti I2s di frequenza fs prodotte dalla fem E2s corrisponde una f.m.m. rotante che ruota rispetto al rotore con velocità:
La velocità rispetto allo statore è: no n + n = no
Quindi in frequenza alle condizioni in esame si ha:
Circuito equivalete di una fase rotorica di una macchina asincrona a rotore avvolto con circuiti rotorici cortocircuitati e con rotore rotante e scorrimento S qualsiasi.
Dividendo il rotore e il denominatore entrambi per S si ottiene:
Moltiplichiamo ambo i membri per il seguente rapporto:
E tenendo conto che E2s = E2 * S si ottiene ( alla frequenza f e non più alla frequenza fs)
Con valori efficaci I2 e I2s ,e E fem di valore efficace E2 = E2s/S
Ne risulta:m

A cui corrisponde il circuito:
Lo schema rappresenta il circuito equivalente di una fase di rotore di una macchina asincrona trifase a rotore avvolto nel funzionamento con circuiti rotorici corto circuitati e con rotore con uno scorrimento S qualsiasi. (fem e corrente rotorica a frequenza f).

TRASMISSIONE DEI PARAMETRI ALLO STATORE (circuito equivalente di una fase)
Le relazioni analitiche sono del tutto uguali a quelle di una fase di un trasformatore chiuso su un carico pari a R2( 1-S )/S
È possibile quindi tramite i rapporti di trasformazione riportare tutti i parametri al primario.
S indica quanti giri perde il rotore rispetto al campo rotante.
Definizione di scorrimento:
SI POSSONO VERIFICARE TRE CASI:
1) Se il rotore va alla velocità di sincronismo n = no
Funzionamento a vuoto: la macchina assorbe la sola corrente Io condizione teorica che si verificherebbe in assenza di perdite meccaniche.
2) quando il rotore è fermo (n=0) si ha:
Funzionamento in cortocircuito ( rotore bloccato): è formalmente uguale al funzionamento di n trasformatore con il secondario in cortocircuito.
3) caso di funzionamento generico con valori dello scorrimento 0<S<1 risulta diverso da zero e di valore finito.
![]()
A meno delle perdite Pmp per la potenza allalbero Pm vale:
Le perdite sono nulle per n=0 e crescenti con la velocità.
Come per i trasformatori la resistenza trasmessa dal secondario al primario (resistenza del secondario riferita al primario) è dello steso ordine di grandezza della resistenza al primario R1.
Nota bene: valori delle resistenze R1 e R212 sono piccoli sono piccoli rispetto a quelli delle reattanze X1 e X2.
Le perdite nel ferro variano con la velocità della macchina Pfp (dovute a correnti parassite ed a isteresi).
Queste perdite sono crescenti con la frequenza ed essendo la frequenza fs delle grandezze rotoriche legate alla velocità ad ogni valore di n corrisponde un determinato valore delle perdite nel ferro di rotore.
Ne consegue che R0 del circuito equivalente dovrebbe essere variabile con lo scorrimento.
La resistenza Ro rappresenta una parte delle perdite a vuoto.
Ro è supposta costante perché si osserva che le perdite meccaniche e le perdite nel ferro e nellisteresi sono inversamente proporzionali se cala una laltra aumenta ma la loro somma Po è costante.
Le perdite nel ferro Pfp è massima per n=0 rotore bloccato e nulla per (n=no) alla velocità di sincronismo.
Ro è una costante quando si ritiene che essa sia la causa delle perdite non nel ferro ma 1/3 delle perdite a vuoto
1/3 delle perdite a vuoto Po = Pfp + Pmp quando la macchina funziona senza coppia esterna applicata allalbero ( n ≈ no ) e si assume tale valore costante qualunque sia la velocità effettiva della macchina.
|
POTENZA MECCANICA
Dato che la potenza persa a vuoto Po dovuta alla presenza di Ro è relativamente piccola rispetto alle perdite nelle componenti resistite del circuito, comporta che la potenza data dalla formula sottostante coincida con la potenza meccanica Pm
|
CIRCUITO EQUIVALENTE SEMPLIFICATO.
(della macchina asincrona trifase M.A.T. a rotore avvolto)
POTENZA ,COPPIA E CARETTISTICA MECCANICA.
Se si trascurano le perdite a vuoto Po si semplifica ulteriormente il circuito semplificato.
La coppia risulta proporzionale alla potenza Pt trasmessa elettromagneticamente al rotore.
Con Pm si è indicata la potenza meccanica.
![]()
Da queste ultime considerazioni si possono fare delle considerazioni sul funzionamento della macchina al variare dello scorrimento S quindi della velocità del rotore.
ROTORE FERMO (n=0 , s=1 )
A rotore fermo, sostituendo S=1 sulle precedenti relazioni:
- potenza meccanica nulla Pm=0
- potenza elettrica uguale alla potenza perduta Pe = Pep
- coppia elettromagnetica C come da formule sottostanti.
Con Ca si esprime la coppia di avviamento.
A velocità nulla la macchina assorbe dalla rete una potenza pari alla potenza perduta per effetto joule negli avvolgimenti di rotore e di statore.
I termini R12/Z e R1/Z sono piccoli rispetto a Z/R12 e pertanto la coppia di avviamento può essere scritta nella forma:
La coppia di avviamento risulta proporzionale alla resistenza di una fase.
ROTORE IN MOTO NELLO STESO VERSO DEL CAMPO ROTANTE.
Con 0<n<no e 0<S<1
Per 0<S<1
- coppia elettromagnetica positiva
- potenza meccanica Pm = C Ωo (1-S)
- potenza elettrica Pe positiva e pari alla somma di Pep e Pm
la macchina assorbe potenza elettrica dalla rete che in parte compensa la perdite per effetto joule negli avvolgimenti di rotore e di statore e in parte compensa le perdite per effetto joule negli avvolgimenti di rotore e di statore e in parte viene convertita in potenza meccanica:la macchina funziona da motore.
Se analizziamo lespressione della coppia C nelle sue derivate
Per questo valore dello scorrimento si ricava:
Trascurando il termine R12/Z la coppia massima può essere scritta anche nella forma:
ROTORE IN MOTO ALLA VELOCITA DI SINCRONISMO (n=no , S=0)
Alla velocità di sincronismo (S=0) sono nulle la potenza elettrica, le perdite per effetto joule, la coppia elettromagnetica e la potenza meccanica: la macchina non assorbe ne fornisce potenza.
ROTORE IN MOTO NELLO STESSO VERSO DEL CAMPO ROTANTE .
(no<n<∞ ) ( -∞ < S < 0)
Velocità superiore a quella di sincronismo (0>S>-∞)
-
coppia elettromagnetica negativa.
-
Potenza meccanica Pm=C Ωo (1-s) negativa.
-
Potenza elettrica Pe con il primo addendo Pep positivo e il secondo Pm negativo.
La macchina in queste condizioni assorbe potenza meccanica allalbero.
Il minimo della coppia motrice Cm aumenta fino ad annullarsi per s=-∞
Il valore minimo si ottiene per:
E per la formula sottostante:
Val la seguente espressione della coppia
La potenza elettrica si annulla per questo valore di scorrimento:
È il valore di scorrimento che rende la potenza elettrica erogata uguale alla potenza meccanica fornita allalbero che è circa uguale a S ≈ -1 = Sr
Visto che i termini R12 e R1 sono dello stesso ordine di grandezza il valore dello scorrimento che annulla la potenza elettrica è S= -1
Se Sr<S<0 si ha per modulo di Pm >Pep la potenza elettrica è negativa quindi la macchina eroga potenza elettrica.
|
La macchina assorbe potenza meccanica e la converte in elettrica quindi in queste condizioni di funzionamento si comporta da generatore.
(generatore sincrono)
|
Per Sr>S>-∞ si ha per │Pm│< │Pep │
La potenza elettrica è positiva e quindi la macchina assorbe sia potenza elettrica sia potenza meccanica che vanno entrambe a compensare le perdite:
|
la macchina in queste condizioni funziona da freno
Sr>S>-∞
│Pm│< │Pep │
(COMPORTAMENTO DA FRENO)
|
ROTORE IN MOTO NEL VERSO CONTRARIO AL CAMPO ROTANTE .
Con (-∞<n<0) , (∞>S>1)
Per ∞<S<1 si ha:
- Coppia elettromagnetica positiva.
- Potenza meccanica Pm=C*Ωo (1-S) negativa.
- Potenza elettrica Pe con primo addendo Pep positivo e il secondo Pm negativo
La macchina assorbe potenza meccanica allalbero.
Poiché inoltre risulta sempre │Pm│< │Pep│ la potenza elettrica Pe è comunque positiva, la macchina assorbe pertanto sia potenza meccanica che potenza elettrica le quali vanno entrambe a compensare le perdite.
La macchina funziona ancora da freno.
ROTORE IN MOTO CON n +/- ∞ , s -/+ ∞
Questa è una condizione teorica in cui S= -/+ ∞ risulta R12 (1-S)/S = -R12 e quindi
Ne consegue che si ha:
- Coppia elettromagnetica nulla
- Potenza elettrica Pe positiva data dalla formula:
- Potenza meccanica Pm negativa data dalla formula:
La macchina assorbe da un lato la potenza elettrica corrispondente alle sole perdite per effetto Joule negli avvolgimenti rotorici.
CARATTERISTICA MECCANICA.
|
La caratteristica meccanica è landamento della coppia elettromagnetica C in funzione della velocità n o dello scorrimento S.
|
Le aree di funzionamento stabile da motore o da generatore sono nei pressi di n=no dove cioè S=0.
Valori tipici ottimali per lo scorrimento che porta la macchina a funzionamenti stabili sono compresi tra 0.01 e 0.06 a parte il caso di piccoli motori in cui il valore può essere maggiore.
DIAGRAMMA CIRCOLARE.
Si usa per il funzionamento a regime permanente della macchina, a tensione e frequenza costanti e per diverse velocità.
Gli autori sono Heyland e Ossana più altri in forme diverse.
Questo diagramma si riferisce al circuito equivalente semplificato.
Nellipotesi di trascurare inizialmente la corrente a Vuoto Io per lo schema sottostante:
Siccome il circuito equivalente si è ridotto a un RL le cadute di tensione risultano senzaltro in quadratura e quindi il diagramma è sempre inscrivibile in una semicirconferenza.
Al variare dello scorrimento varia la Rtot e quindi la corrente I12 però dovendo risultare sempre più di 90 gradi langolo cade sempre in un punto della circonferenza.
Per S=0 n=no funzionamento a vuoto della macchina risulta :
![]()
I12=0
Il punto F cade in Fo
Per (S=1) (n=0) si ha il funzionamento in corto circuito.
Risulta:
![]()

La caduta ohmica diminuisce rispetto a quella induttiva ed il punto F cade in Fcc con FoFcc.
![]()
Per (S=∞) (n=∞) risulta:
![]()
La caduta ohmica diminuisce ulteriormente rispetto a quella induttiva ed il punto F cade in F∞ con:
![]()
Per (S=Sr) risulta
La caduta ohmica si annulla ad il punto F coincide con A.
SCORRIMENTO E RENDIMENTO.
Lo scorrimento S in un generico punto di funzionamento è ricavabile dalla relazione:
n.b. anche se le ordinate rappresentano una scala per le tensioni V/√3 in realtà esse hanno origine dalla componente Ia della corrente di perdite.
Le ascisse sono la componente Iu .
Quindi il diametro FoA del diagramma circolare è dimensionalmente una corrente.
Esiste una tecnica grafica meno grossolana che mette meglio in evidenza lo scorrimento.
Il punto X (rendimento percentuale) si ottiene prolungando OF.
Il punto R (scorrimento percentuale) si ottiene prolungando FoF
TRACCIAMENTO DEL DIAGRAMMA CIRCOLARE.
Per costruire il diagramma circolare e le relative rette di funzionamento è sufficiente conoscere i punti Fo (n=no), Fcc (n=0), e F∞(n=∞) si può tracciare in sede di progetto o in sede di collaudo.
SEDE DI PROGETTO.
In sede di progetto il diagramma circolare si costruisce partendo dalla tensione di alimentazione e dai parametri del circuito equivalente ricavati in base ad un dimensionamento di massima della macchina.
In particolare, dal calcolo delle perdite nel ferro di statore e di quelle meccaniche per n=no si ricava la componente Ia della corrente Io mentre dal calcolo delle ampere spire assorbite dal circuito magnetico della macchina si ricava la componente Iu.
Fissati un sistema di assi cartesiani ed una scala per le correnti, si riportano la corrente Iu lungo lasse delle ascisse e la corrente Ia lungo le ordinate.
Resta pertanto determinata in ampiezza e fase la corrente Io e quindi il punto Fo.
|
Si tenga presente che lasse delle ordinate rappresenta la direzione di riferimento della tensione applicata V/√3, sia le ascisse che le ordinate alla fine sono delle correnti.
|
S=scorrimento assoluto = differenza no-n
.no = campo magnetico di rotore e di statore.
.n = velocità meccanica di rotore.
TRACCIAMENTO DEL DIAGRAMMA CIRCOLARE IN SEDE DI COLLAUDO.
Il diagramma circolare può essere tracciato eseguendo sulla macchina funzionante da motore le seguenti prove.
1. prova a vuoto
2. prova in corto circuito.
3. misura volt-amperometrica della resistenza R1 di una fase dellavvolgimento di statore.
PROVA A VUOTO E PROVA IN CORTO CIRCUITO.
Si alimenta il motore con un sistema simmetrico di tensioni concatenate.
La prova a vuoto si effettua senza applicare alcun carico allalbero e alimentando il motore alla frequenza e tensioni nominali.
In tali condizioni risulta n≈no
S≈0 si misurano:
|
|
Da tali misure si calcola il fattore di potenza a vuoto:
E quindi si trova langolo di fase φo
PROVA DI CORTO CIRCUITO. con rotore bloccato (n=0, S=1) si misurano:
|
|
Con queste misure si determina il fattore di potenza in corto circuito:

Nota bene: nelle prove di corto circuito la corrente di corto circuito è generalmente 4 ÷ 8 volte la corrente nominale, è quasi sempre opportuno ridurre la tensione applicata ad una frazione 1/K della tensione nominale, riportando poi le misure effettuate alle effettive moltiplicando per K l e correnti e le potenze per K2.
Facendo queste misure è possibile tracciare le correnti Io e Icc in ampiezza e fase.
|
Per trovare il centro del diagramma circolare bisogna sapere che esso si trova sullasse del segmento FoFcc e sulle parallele alle ascisse, quindi bisogna trovare Io (prova a vuoto) e Icc (prova in corto circuito)
|
POTENZA DISSIPATA PER EFFETTO JOULE.
La misura della resistenza R1 permette nella prova in corto circuito di misurare la potenza dissipata per effetto joule.

Tracciamento del diagramma circolare in fase di collaudo.